電子基準点のみを既知点とするスタティック法による結合多角方式
初めに
・このページは、Droggerを使い電子基準点のみを既知点とするスタティック法による結合多角方式の
計画、観測、解析から地積測量図と調査報告書の作成までをまとめたものです。
事前準備
・RTK受信機 ユーザーズマニュアル
Drogger Processor ユーザーズマニュアル
↑のマニュアルを熟読してください。
・Drogger Processorで最新のセミダイナミックパラメータのインストール、Commercial ライセンスのインストールを行ってください。
※Commercial ライセンスを購入しないと、精度管理表、平均図、網図等が出力できません。
ここではCommercial ライセンス有で説明していきます。
・電子基準点のデータを取得する為、電子基準点SFTPアカウントの取得を行ってください。
SFTPユーザ登録のご案内
・Drogger Processorのプログラムの更新をします。
頻繁にアップデートしているので、解析する前にまずプログラムの更新をします。
・Drogger-GPSを更新します。
・Drogger-GPS V3.1では目的別の設定がすぐ行えるようになっています。
使う受信機を選択→設定ボタン→パッケージを選択→簡単設定→スタテック観測を選びます。
・念のため以下の設定になっているか確認をしてください。
衛星はQZSS,GLONASS,GalileoはON。BeiDouはOFF。
3周波モデルはL5/E5a/B3を有効にする。
その他の補正サービスはすべてOFF。
計測・更新レートを1Hzにする。
RZX.Dでファームウェアを4.15.0に更新済みならAdvanced optionsでL1C/B信号を有効にするをON。
・確認できたら設定に名前をつけて保存しておきます。(名前は任意)
・受信機のファームウェアを最新にしておきます。
参考URL
https://www.bizstation.jp/ja/drogger/man/bt_test.html#idfwupdate
https://www.bizstation.jp/ja/drogger/man/rzs_fw.html
RZX.Dでファームウェアを4.15.0に更新済みならAdvanced optionsでL1C/B信号を有効にするをON。
・バッテリーを充電しておく
※スタティック法の場合ネット回線は必要ありません。
・電子基準点の稼働状況を確認する。
電子基準点停止状況
使用を予定している電子基準点が停止していないか確認します。
基準点測量の計画
・作業規程の準則に従い、計画をしていきます。
・電子基準点のみを既知点とするスタティック法による基準点測量(1級から3級まで4級は認められていません)は、
現場の近くに既知点が全く無く、広大な土地を測量する場合に採用する方法と考えます。
その理由として、一番下位の3級基準点測量でも新点間距離は標準で200mとなっており、
市街地での1筆地測量では、近傍に基準点は大抵あり、GNSS測量機やTSを使って現場近くに新点を設置できます。
新点間距離200mを守るとした場合、現場近くに新点1点、後視点1点を200m離れたところに設置するとしても、視通の問題によりほぼ難しいと思います。(視通が通るなら可)
又、2点を200m離して設置して、その間をTSで繋げるにしても2点では既知点不足(GNSS測量では可)であり、最低3点は必要となります。
・そこで、本研修では近傍に既知点が無い広大な土地を測量する為、電子基準点のみを既知点とするスタティック法による3級基準点測量を行い、
3級基準点相当の新点を3点設置し、その後TSを使い4級基準点測量を行い、4級基準点相当の新点を設置することを計画します。
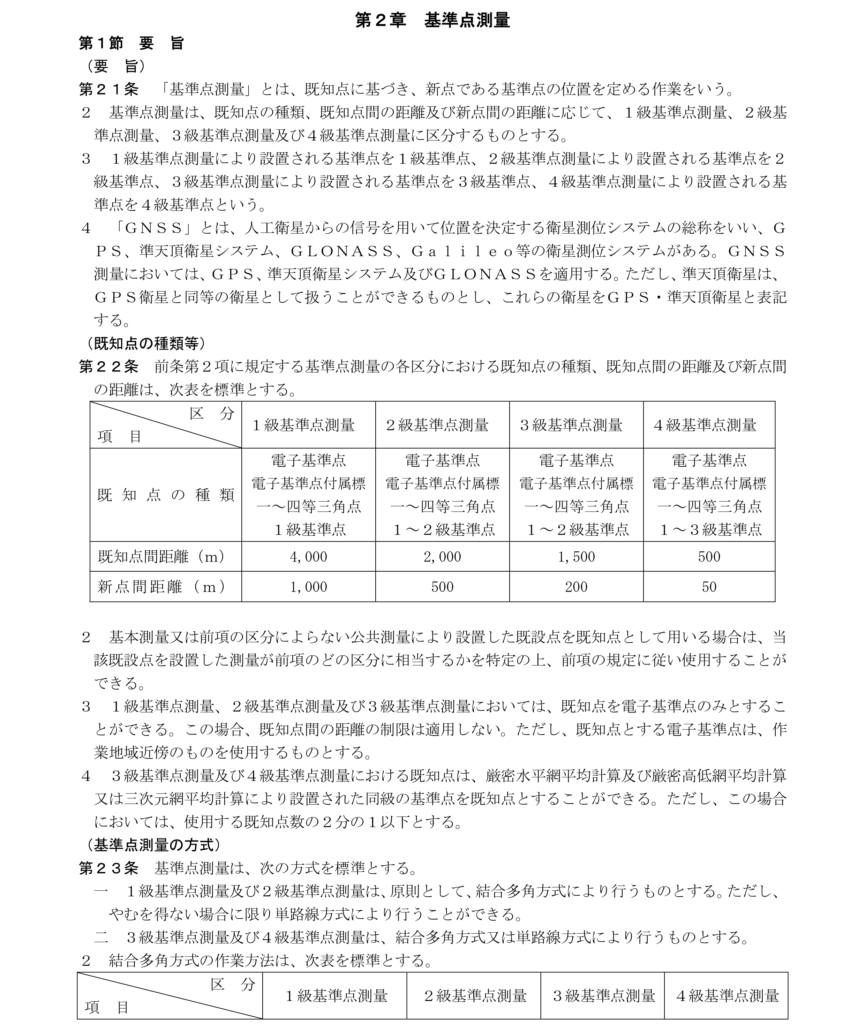
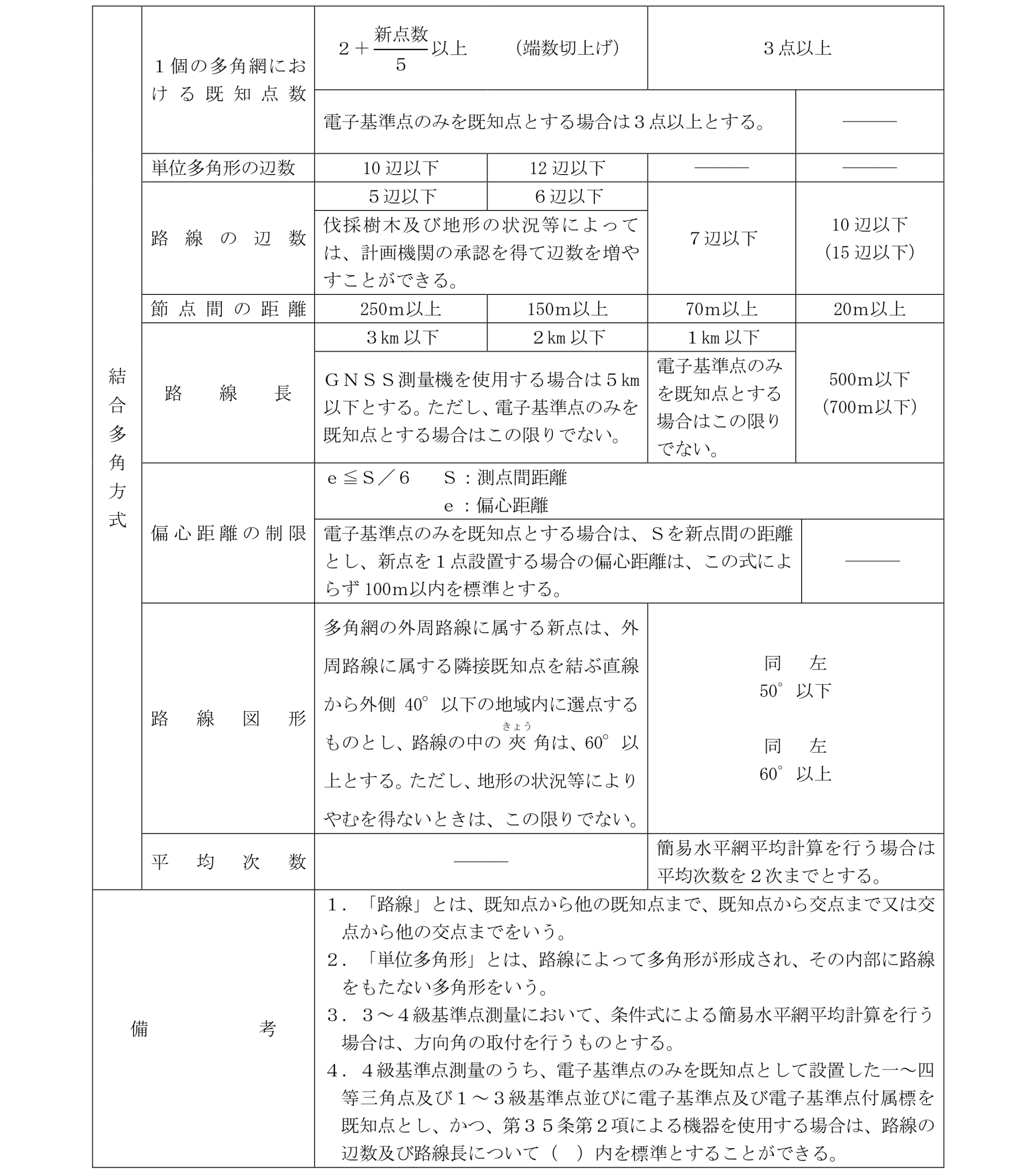
・作業規程よりGNSS観測での3級基準点測量の結合多角方式では既知点は3点以上、単路線方式は既知点は2点でOK。
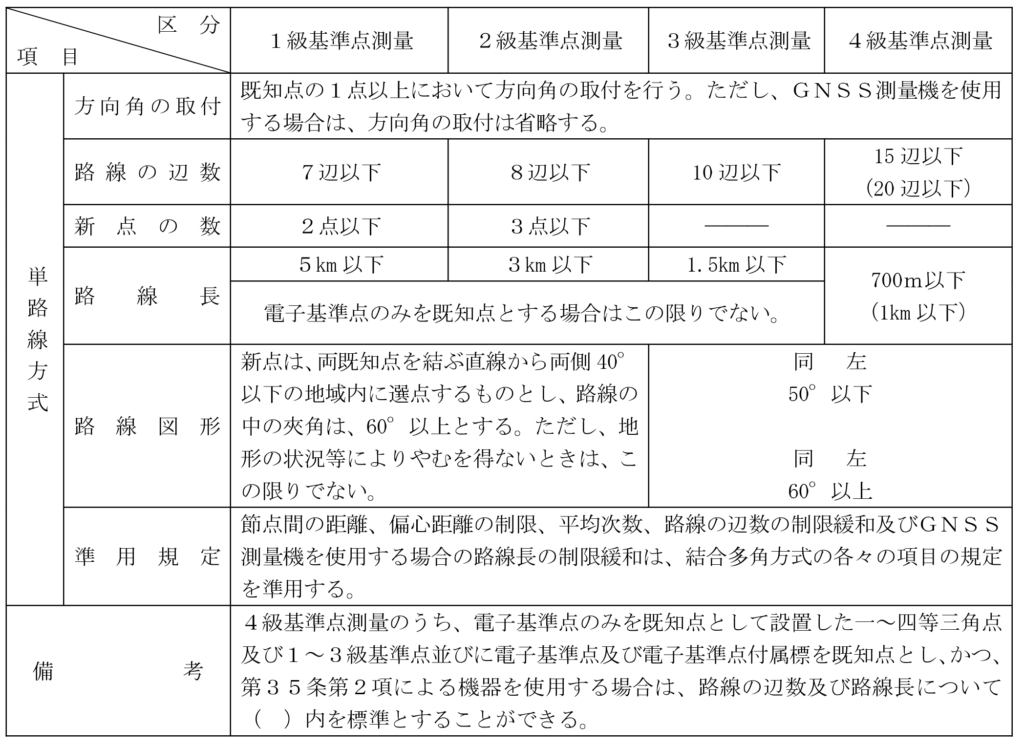
・既知点を結ぶ両側50°以下の地域内に新点を設置するようにします。
・路線の中の夾角は60°以上とします。
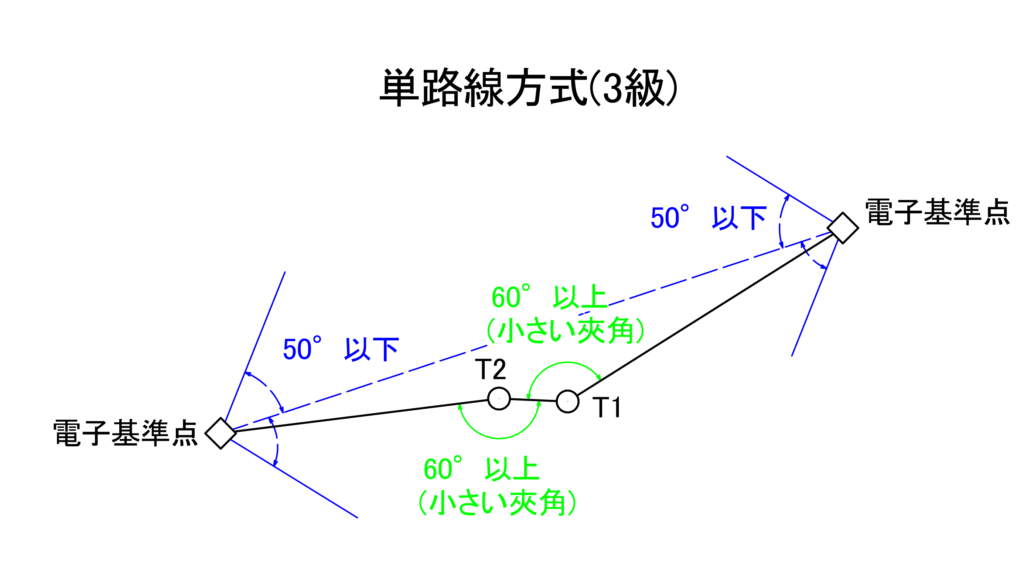
・3級での結合多角方式と単路線方式の例です。
新点間距離は標準で200mです。
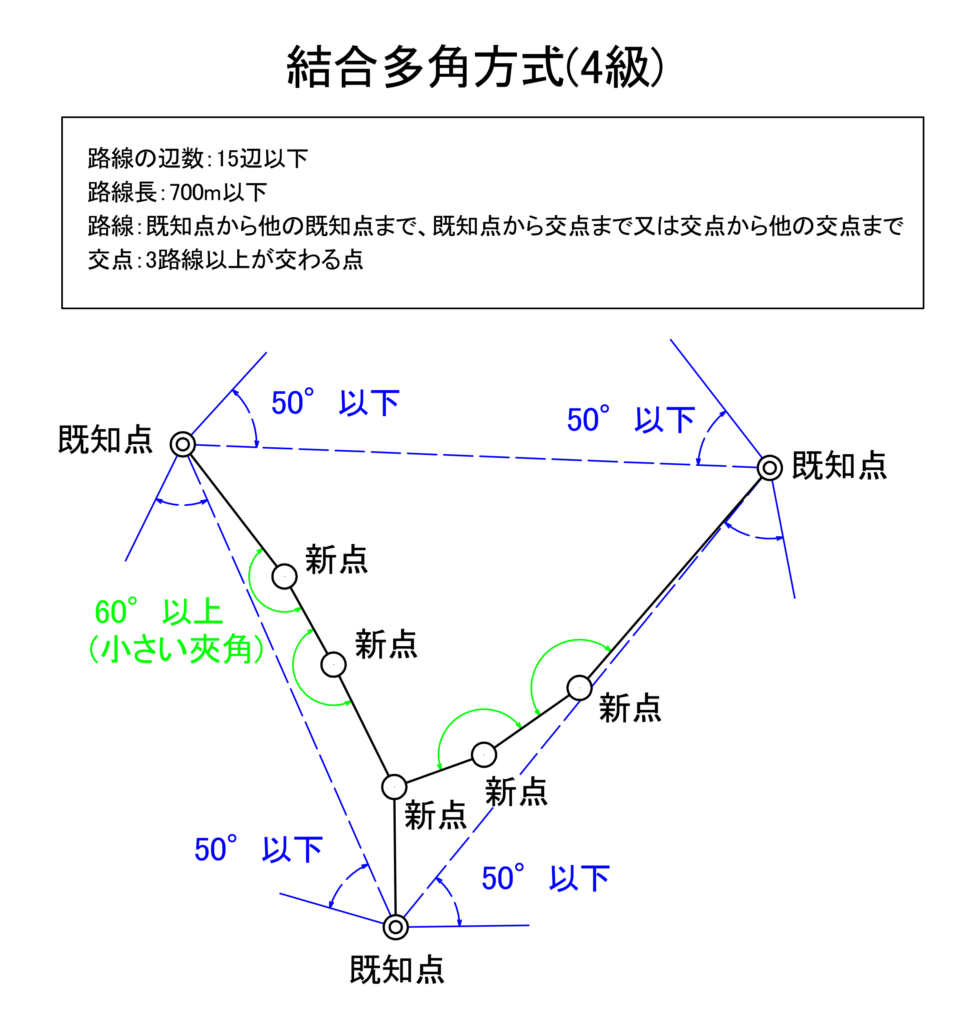
・4級での結合多角方式です。作業規程に従って計画します。
新点間距離は標準で50mとなっています。
上記に従い選点計画をしてきます。
今回の研修での計画は次の図です。

・測量する土地は黄色の線で囲んだ箇所で、申請地北西、北東、南側に新点3点(3級相当)を設置し、
新点3点を与点として、TSで結合多角方式による4級基準点測量を行い新点5点を設置する計画です。
・新点間の距離は、3級基準点測量では200mが標準となっていますので、できるだけ守ります。
・新点位置の計画を立てたら、次に観測時間を決める為、電子基準点の位置と距離を確認します。
観測時間
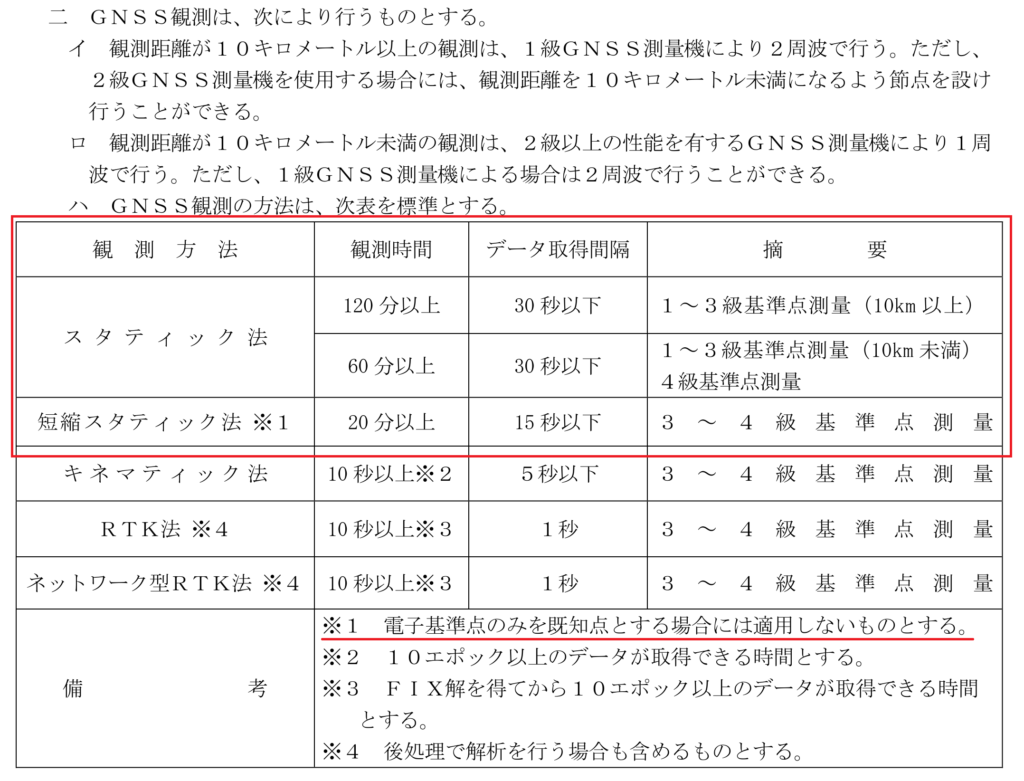
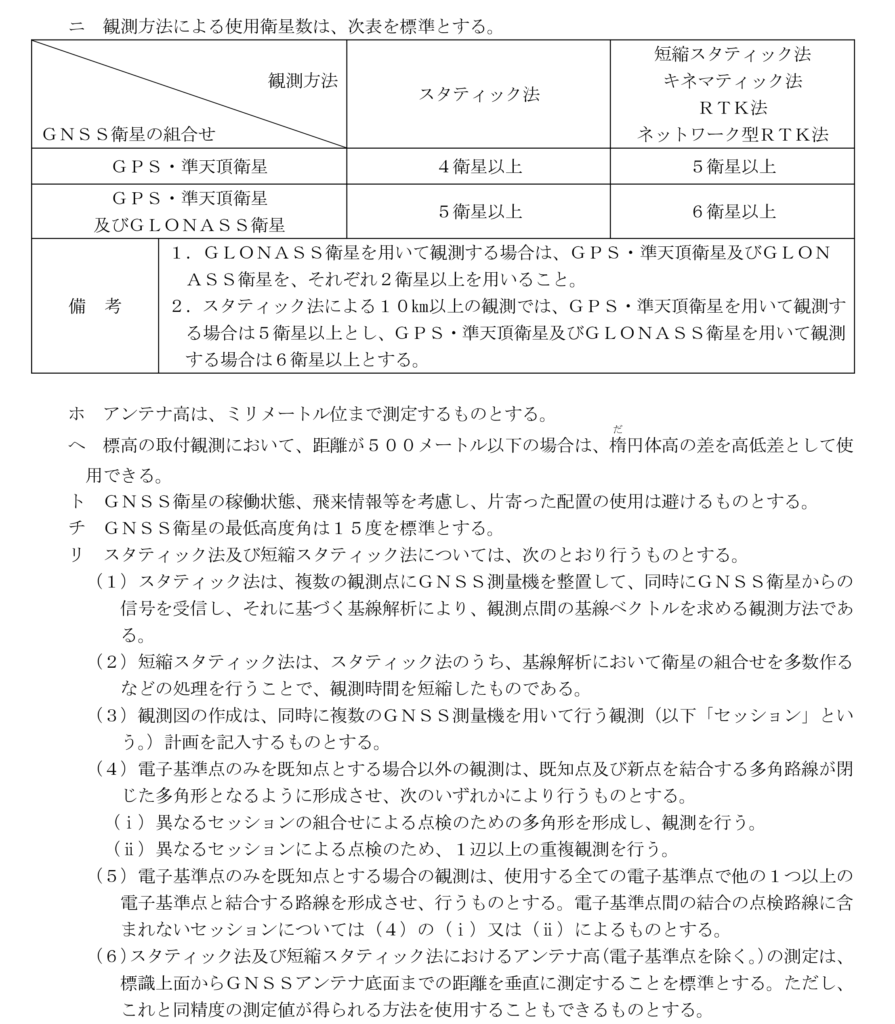
・作業規程によるGNSS観測時間、データ取得間隔、適用の表です。
・Droggerの1部機種(RZX.D等)は、1級GNSS測量機として登録されています。
・今回の電子基準点のみを既知点とする3級基準点測量では、観測距離(使用する電子基準点と新点との距離)が10km以上の場合は、観測時間は120分以上。
10km未満の場合は60分以上行うこととなっています。
※電子基準点のみを既知点とする場合、短縮スタティック法は認められていません。
・そこで新点から電子基準点までの距離を確認します。
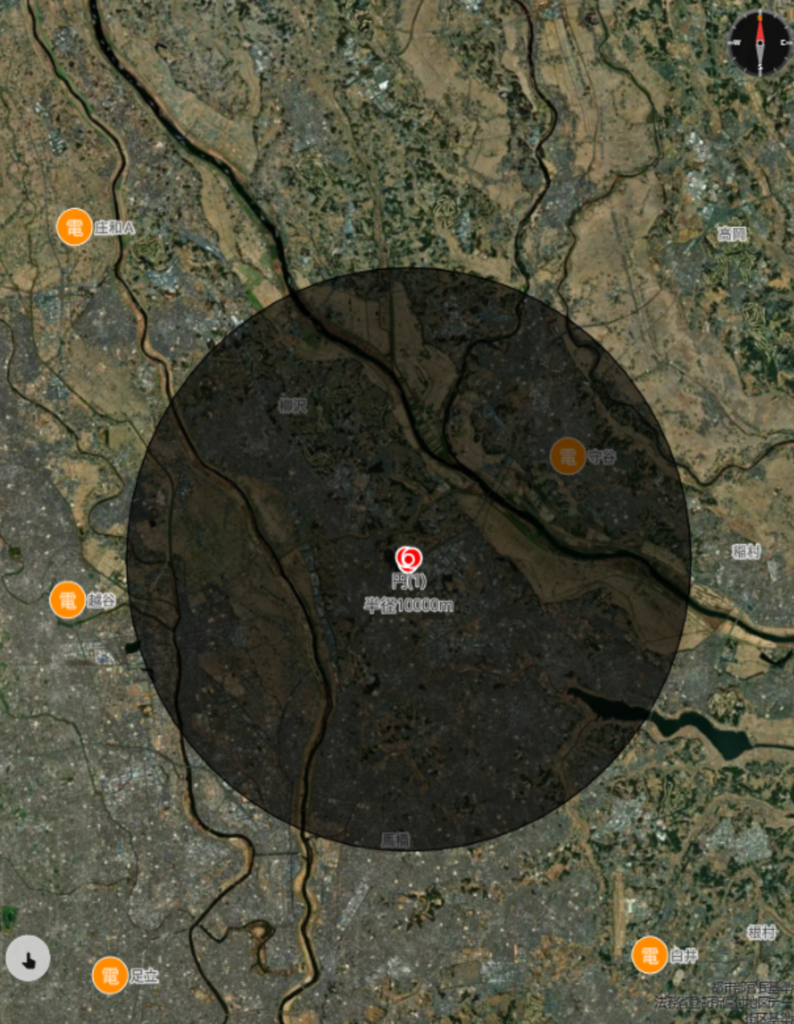
・オープンひなた3を使って新点から電子基準点までの距離を確認してみました。
・10km範囲だと守谷のみしかありません。
・20kmに変えて確認します。

・越谷、白井、足立、庄和Aが範囲内になりました。
・既知点は最低2点以上必要なので、観測時間は120分以上となります。
・リ(5)を確認してください。「使用する全ての電子基準点で他の1つ以上の電子基準点と結合する路線を形成」
「電子基準点間の結合の点検路線に含まれないセッションについては(4)の(ⅰ)又は(ⅱ)によるものとする。」とあります。
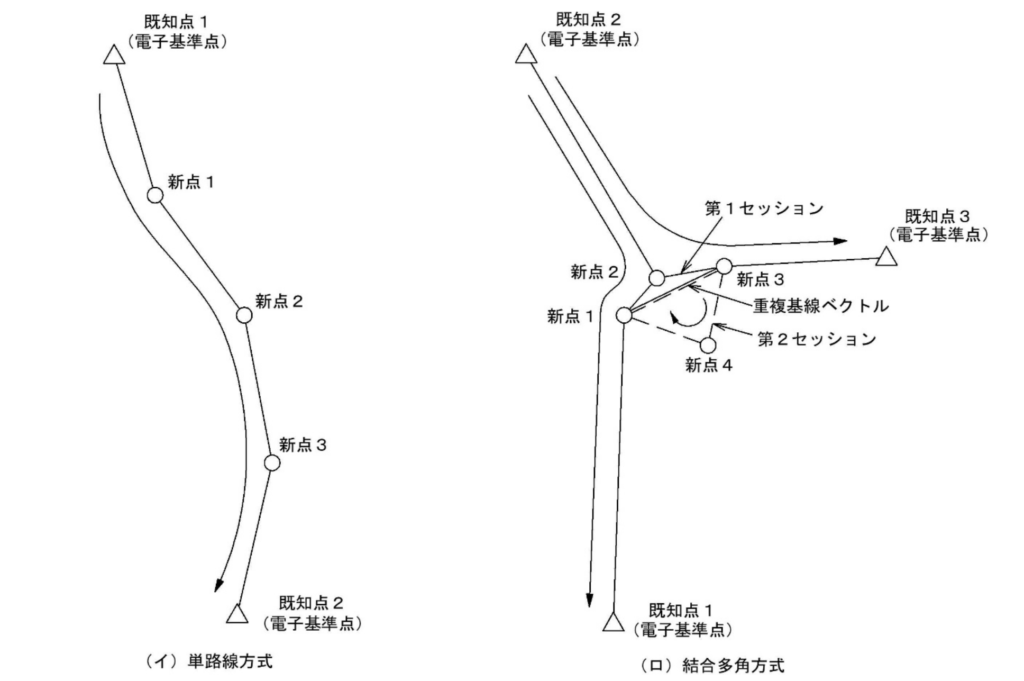
・右の図が上記についての説明図です。(※登記基準点マニュアルより)
・新点4は電子基準点間の結合路線に含まれないので、異なるセッションを組んで新点1と新点3の重複基線ベクトルの較差
又は 新点1→新点3→新点4の異なるセッションにより形成された単位多角形の環閉合差により点検をしています。
セッション計画
・上記に従いセッションの計画をします。
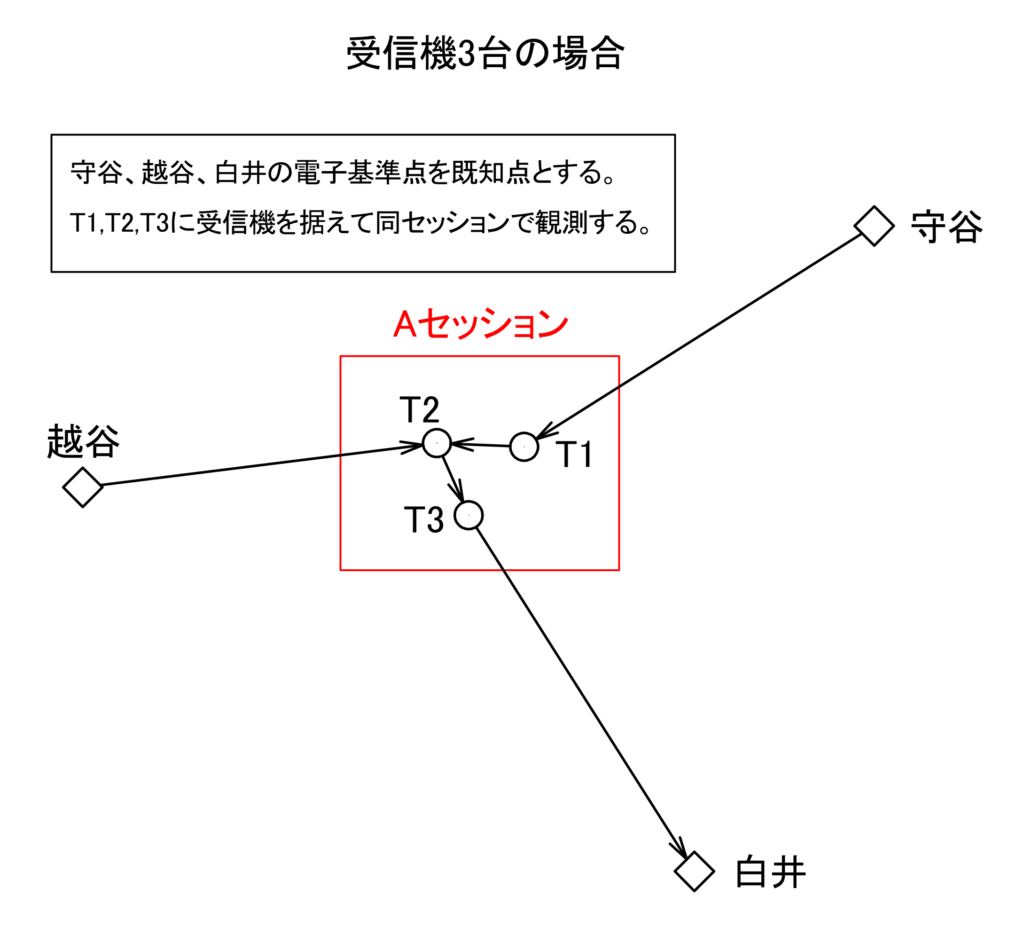
・受信機(※Drogger)3台の場合のセッション計画です。
新点から近い電子基準点 守谷、越谷、白井を既知点とします。
電子基準点の結合路線に含まれない新点はなく、守谷→T1→T2→越谷、守谷→T1→T3→白井の路線で点検できますので、Aセッションのみで2時間観測します。
・電子基準点を使う場合、現地に据えて観測するのではなくデータを取得して解析するので、電子基準点2点の単路線方式ではなく結合多角方式を採用しています。
単路線方式よりも既知点が増え、網の形状も直線から網目状になり精度的に有利であるからです。
・図の矢印はベクトル方向です。通常北から南に向かうベクトル方向にします。
始点の守谷、越谷からスタートして終点の白井に繋ぎます。
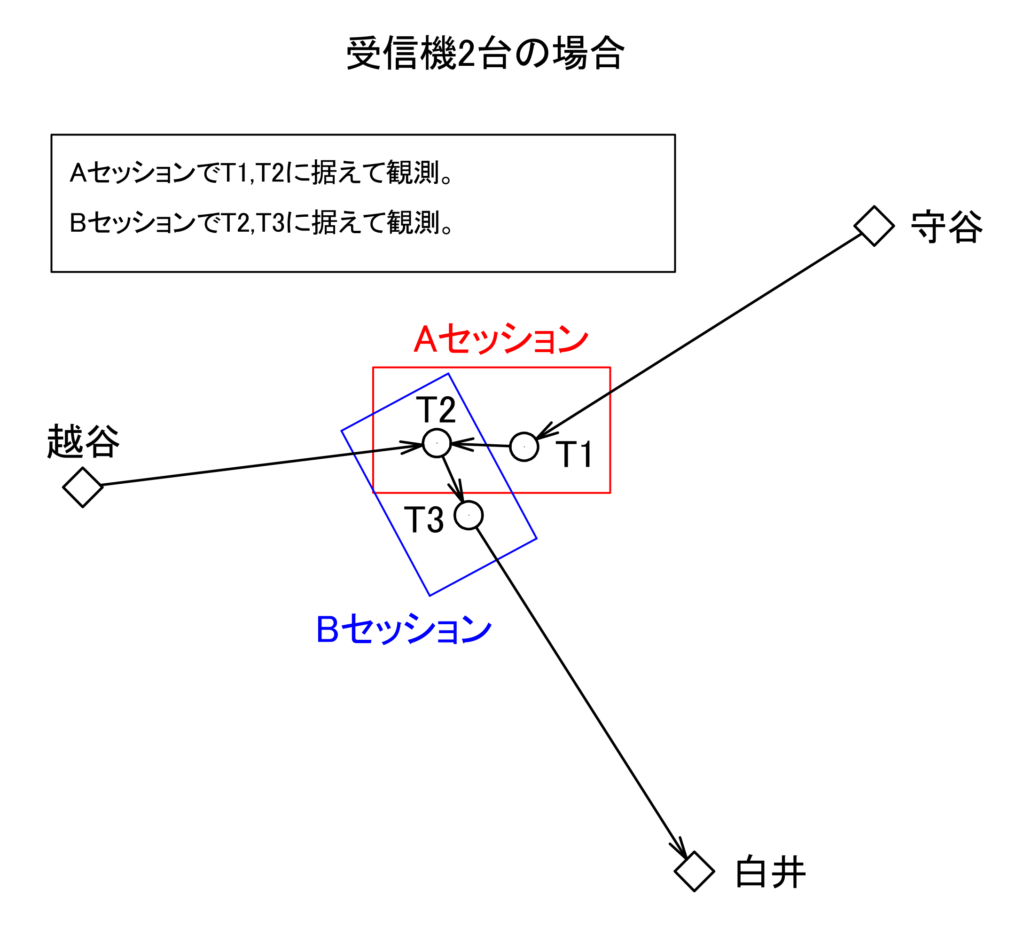
・受信機2台の場合のセッション計画です。
AセッションでT1,T2に、BセッションでT2,T3に据えて観測します。
・T1の受信機は、Aセッションの観測が終わったら、T3に移動してBセッションの観測をします。
T2の受信機は、Bセッションの観測が終わるまでAセッション開始からずっとRAWデータを記録させておきます。
・受信機2台の場合はAセッションで2時間、Bセッションで2時間の合計4時間の観測が必要です。
※近傍の既知点を与点とするスタティック法では、受信機が最低3台無いと効率が悪い為、(※セッション数が倍以上となる)
スタティック法をやる場合、受信機3台以上の用意をお勧めします。
現地での選点
・Droggerで観測する場所は、上空視界が開けていて、近接に高い建物が無い事などが望ましいです。
・上空視界が悪そうな場合は、違う場所にすることを検討します。
・長時間Droggerを据えたままにするので、人や車等の邪魔にならない場所になるべくします。
Drogger-GPSを使い観測
・Droggerを観測する点に据えて電源を入れます。
・Xパッケージでは受信機のアンテナの黒いつばを北に向けます。(他のアンテナタイプはこちらを参考に)
・アンテナ座面高を計測します。
・Drogger-GPSでスタティック用の設定(受信衛星、3周波、計測レート等)を確認し、
Select deviceで接続するDroggerを選択して、右上のStartボタンを押して接続します。
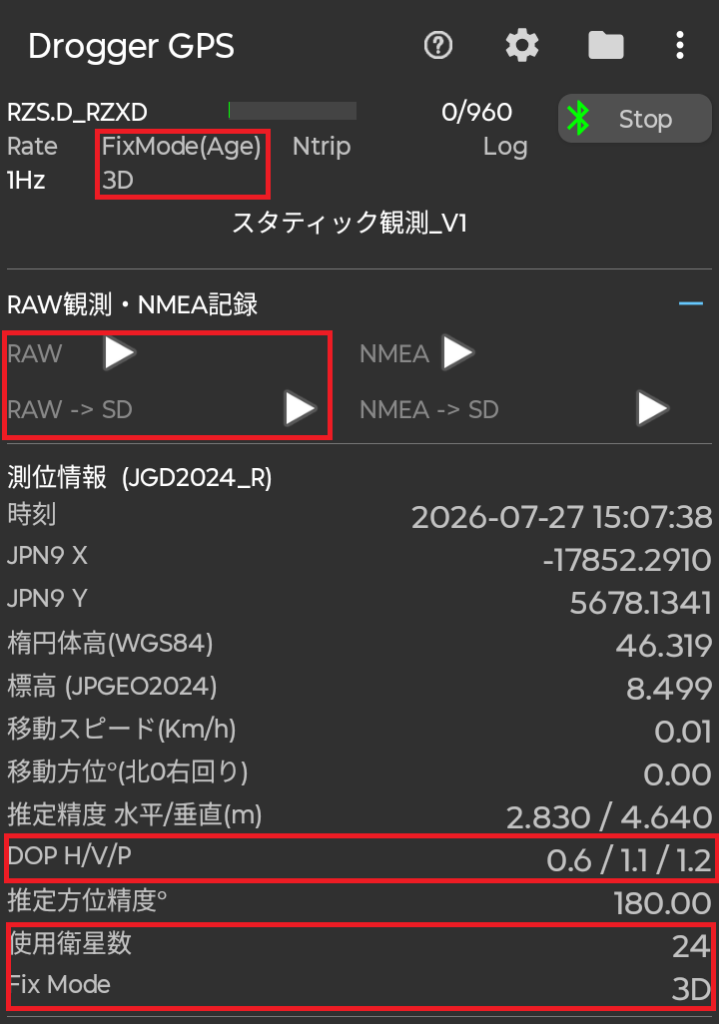
・DOP H/V/Pとは、衛星配置の良さを係数で表しています。
Hは水平、Vは垂直、Pは位置を表しています。数値が小さいほど精度が良いとなります。
確認するのはPの値です。1に近いほど良いです。
・使用衛星数も確認しておきます。大体15以上は使用しています。
・Fix Modeが3Dになっていれば水平・垂直とも位置はFixしています。
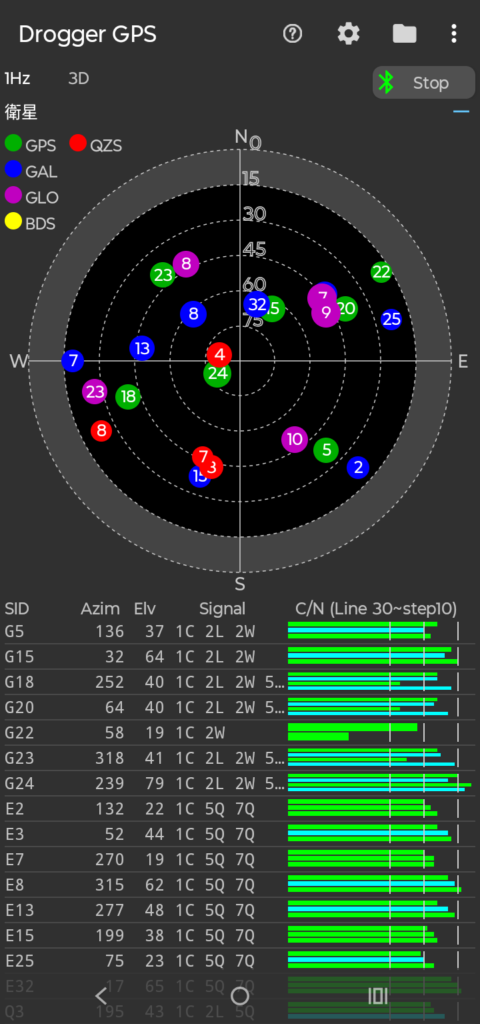
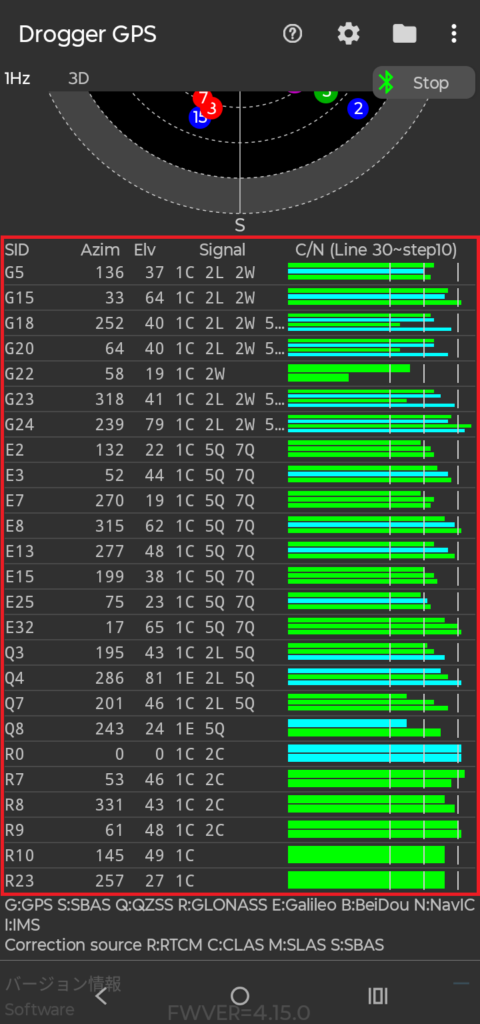
・下にスクロールすると衛星位置の表示と衛星からの受信感度レベルが見れます。
緑色のグラフは位置情報の計算に使用しています。水色は正常に受信していますが、位置情報の計算には使用していません。
黄色は信号を使用できない、赤色は信号を確認できない。との事です。
※Fix Modeがしばらくしても3Dにならない、DOPが悪い、使用衛星数が少ない等の場合は、観測する場所を変えることも検討します。
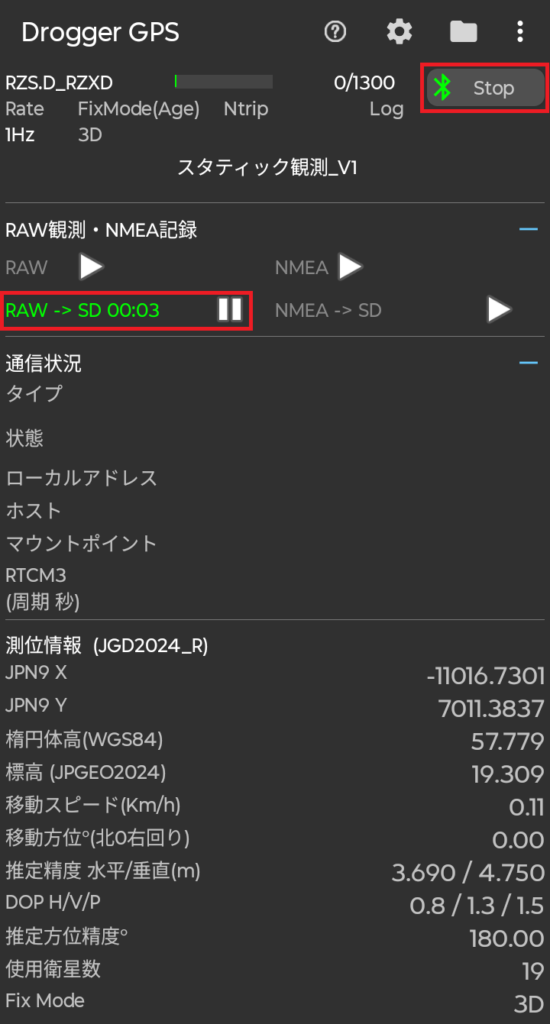
・上記確認したら観測します。
RAW及びRAW→SDの右の▶ボタンを押します。
スマホで記録する場合はRAWの▶を、SDカードに記録する場合はRAW→SDの▶です。
両方同時に記録も可能です。

・セッションはAから順に使います。
・点番号は任意ですが、1から始めるのが通常かと思います。
※点番号、点名は異なるセッションでも同じものを使います。
・受信機とアンテナは使用しているものを選択します。S/Nはシリアルナンバーです。任意です。
・アンテナ座面高をコンベックスで測って入力します。測る点から画像の赤線までの高さを測ります。
アンテナの種類は色々ありますので、使用しているものを選択します。
・取得間隔(sec)は、電子基準点のデータは30秒ごとのデータなので30を選択します。
・入力し終えたら右下のSTARTを押せば観測が始まります。
・観測が開始したら右上のStopを押してDroggerとの接続を切ります。
接続を切っても観測データは記録されます。
※スマホに記録している場合は接続を切ってはダメです。
・これを台数分行います。
・最後に観測を開始した時から設定時間(今回は2時間)が過ぎたら、Droggerに接続してRAW、RAW→SDの右の停止ボタンを押します。
・観測が終了したら、データ記録のストップとDroggerの電源を切って撤収し、解析をするという流れです。
Drogger Processorで解析
・DroggerからSDカードを取り出してUBXファイルを取り込みます。
スマホの場合はRAWフォルダにデータがありますので、Googleドライブ等に転送します。
・複数のDroggerから観測データを取り込むので、どれがどれか分からなくならないように
自分はDroggerに名前を付けて(例:RWX.DC1,RZX.D1,RZX.D2)、PCでフォルダを作って入れています。
セッション名の後に点名を入れてリネームするのもいいと思います。
・観測データを取り込んだら解析を始めます。
・Drogger Processorを起動し、まずプログラムの更新をします。
・ファイル→新規プロジェクト→任意のプロジェクト名を入力しOK。
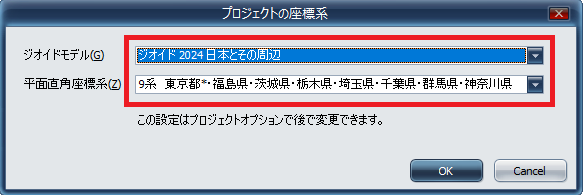
・電子基準点を使う場合はジオイドは2024を選択。
・平面直角座標系は測量する場所のものを選択。
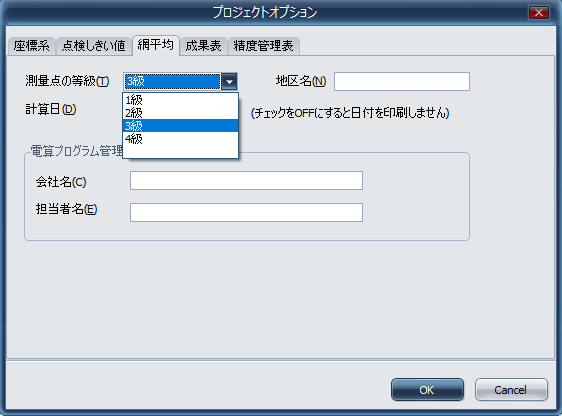
・ファイル→プロジェクトオプション→網平均タブで測量点の等級で3級を選択。
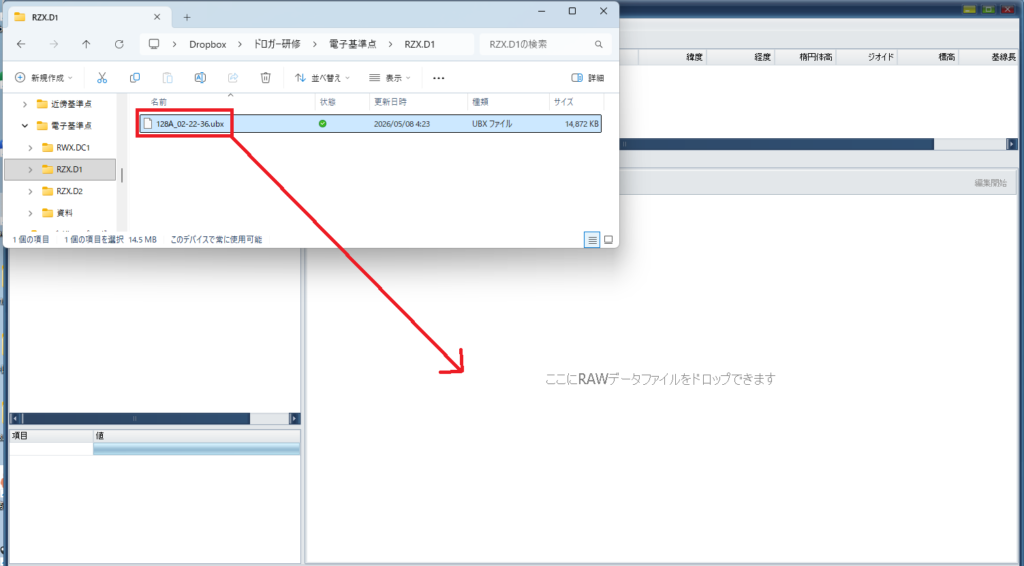
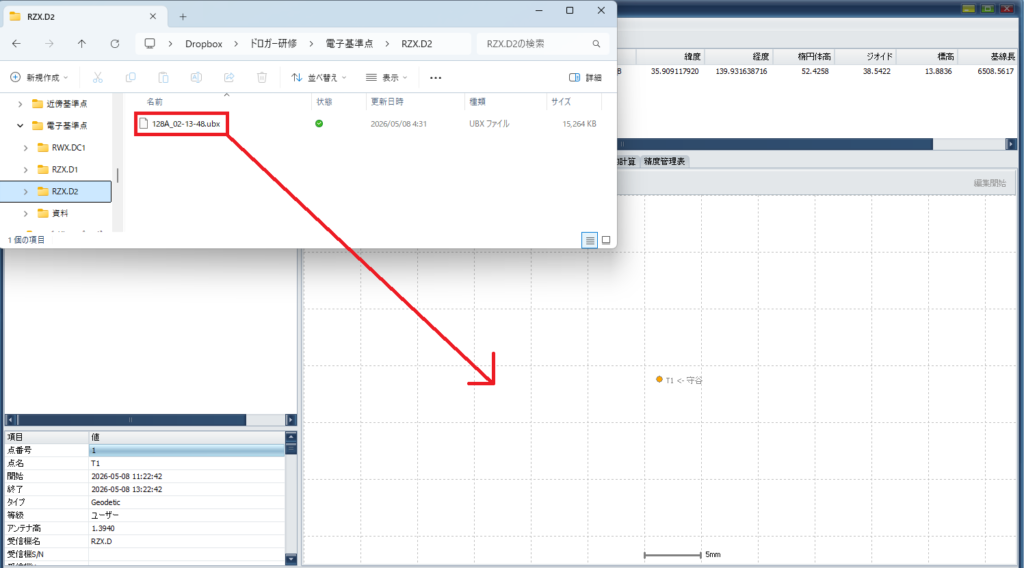
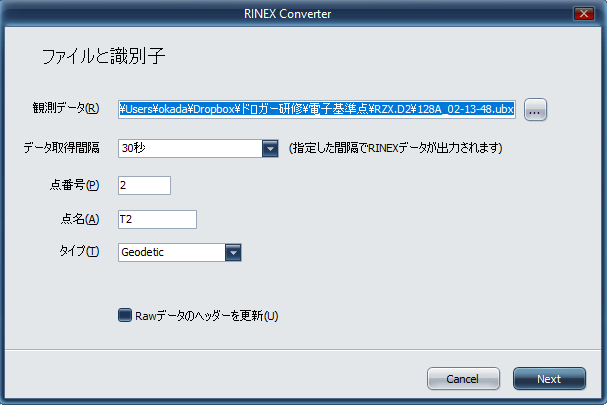
・今回T1を最後に据えて観測したので、T1の観測データからドロップしていきます。
※左上のセッション作成からセッションを作る方法でも問題ないです。好きな方法で構いません。
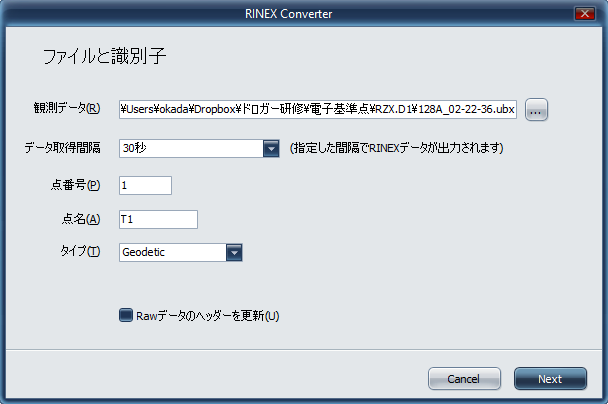
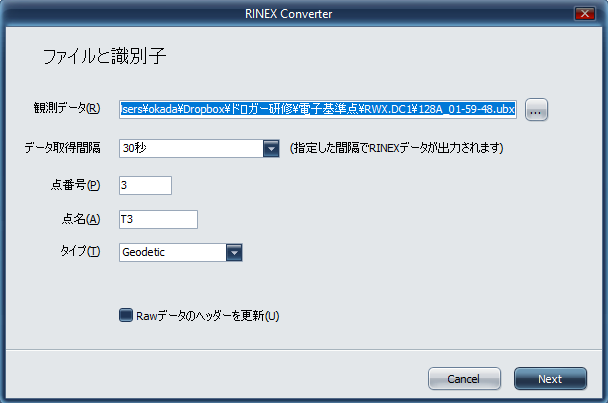
・データ取得間隔は30秒を選択します。
・点番号、点名を確認します。間違っていたら直します。
・タイプのところはデフォルトのGeodeticでOK。
・Rawデータのヘッダーを更新のチェックはOFF。
・Nextで次へ。

・受信機とアンテナの種類とアンテナ座面高の確認をします。
間違っていたら直してNextです。
・S/N(シリアルナンバー)、F/W ver(ファームウェアバージョン)は任意です。
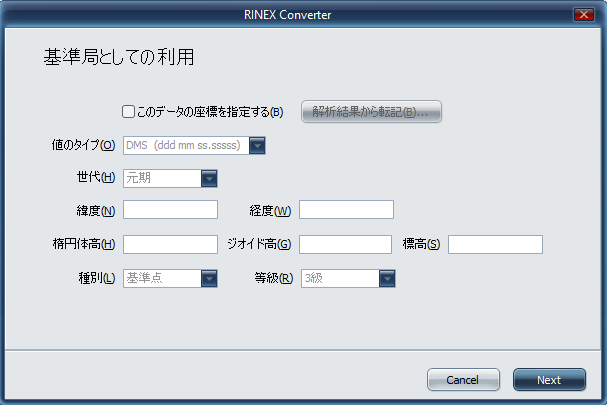
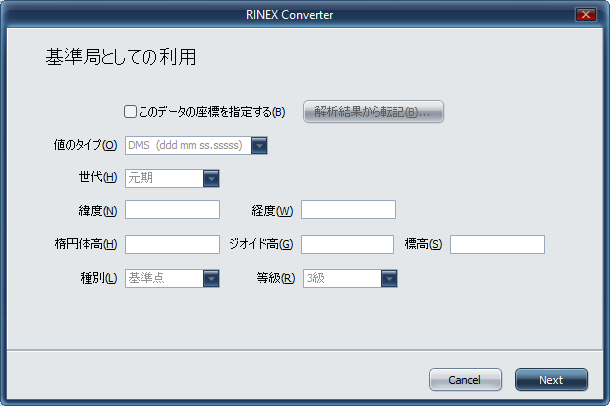
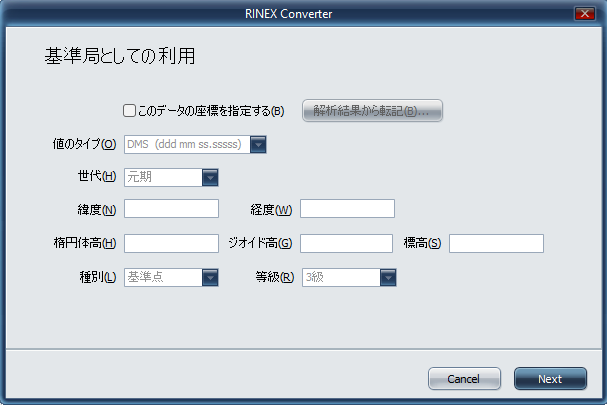
・T1は新点なので基準局としての利用はないので、何も入力せずNext。

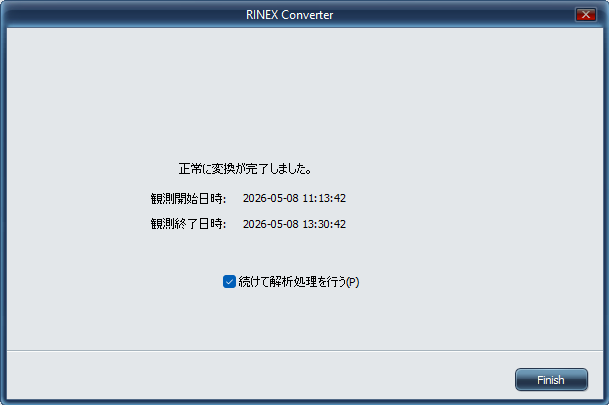
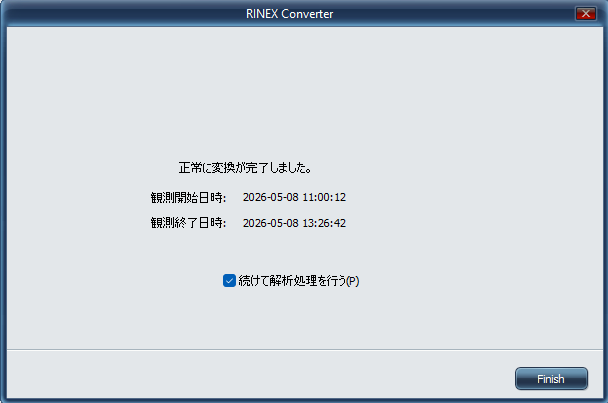
・RINEX変換が完了しました。「続けて解析処理を行う」のチェックを入れてFinish。
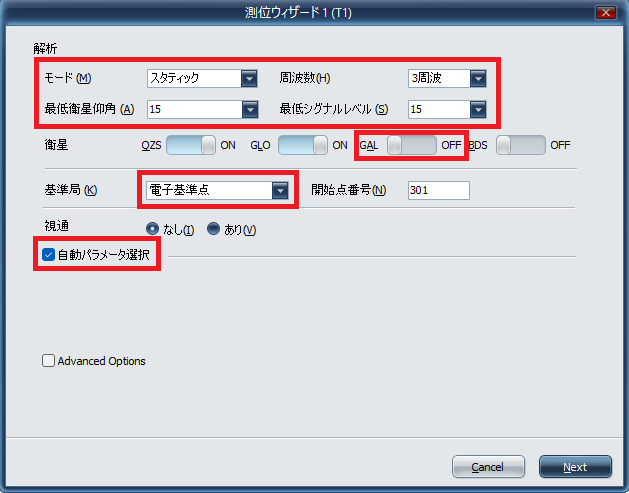
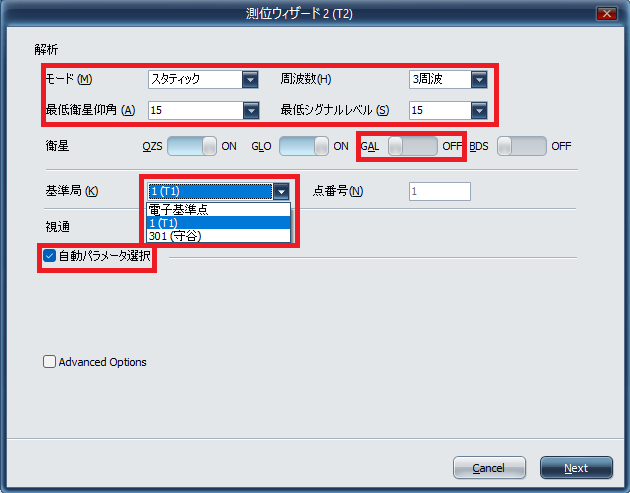
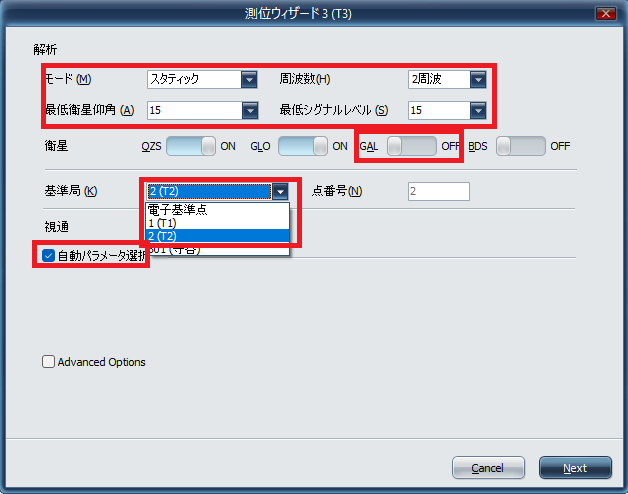
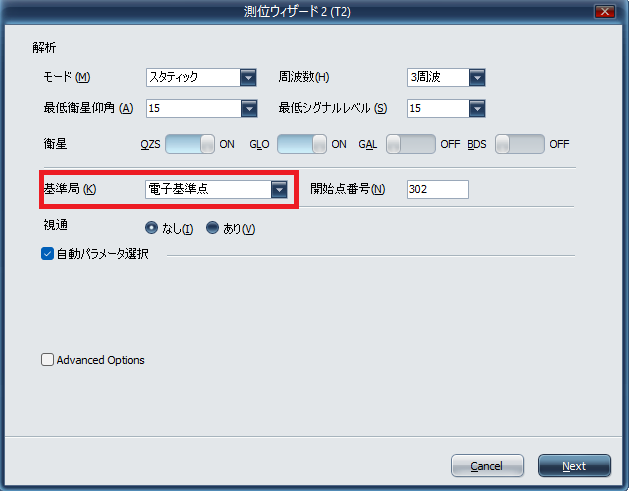
・測位ウィザードです。モードは「スタティック」、周波数は3周波が受信できる機種は「3周波」をそれ以外は「2周波」
最低衛星仰角はデフォルトの「15」、最低シグナルレベルもデフォルトの「15」
・衛星の箇所はQZS,GLOをONに。GALとBDSはOFFにします。
・基準局は電子基準点を選択。
・視通は「なし」
・自動パラメータ選択のチェックは入れて解析します。
・Advanced Optionsのチェックは入れないでNextです。
※解析結果や計算結果によって自動パラメータから個別の条件を変えて再度解析することを検討します。
・測位ウィザードの項目の詳細については、こちらで確認してください。(解析条件の詳細)
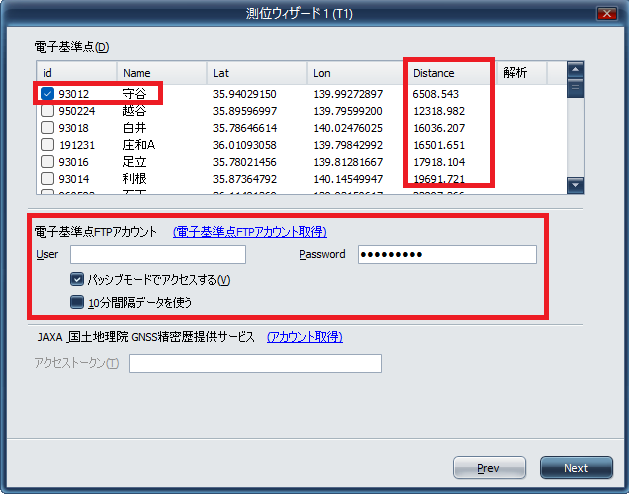
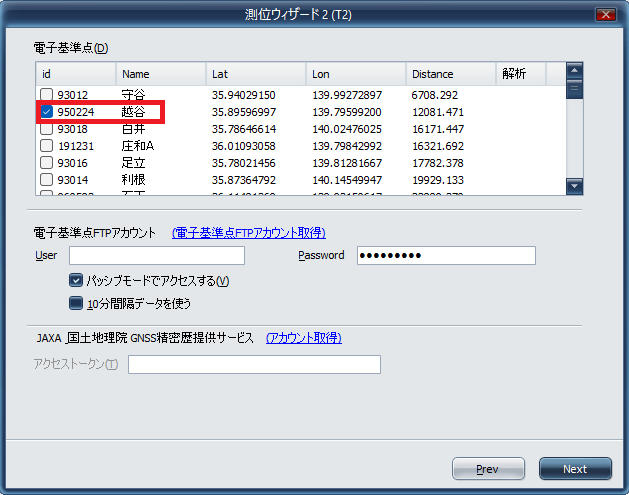
・電子基準点がT1から近い順に並んでいます。
計画通り守谷を始点としてT1への基線ベクトルを作るので、守谷にチェックを入れます。
・電子基準点FTPアカウントの欄には、取得したユーザー名とパスワードを入れます。
「パッシブモードでアクセスする」のチェックはオン「10分間隔データを使う」のチェックはオフでNext。
・電子基準点データのダウンロードが始まり解析します。
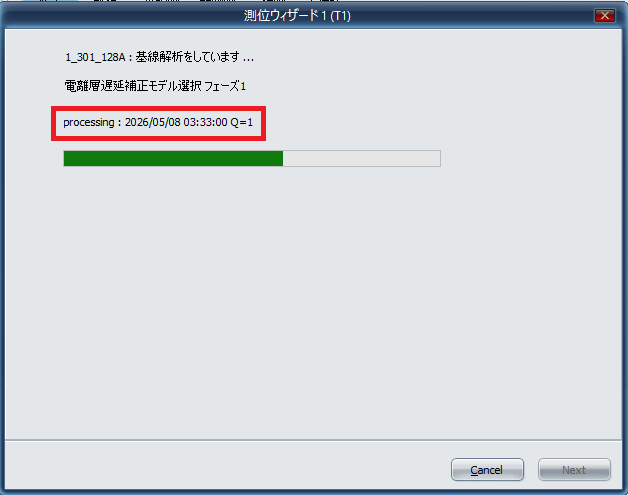
・解析中の画面です。Q=1はFix解となっています。Q=2だとFloat解です。
Q=2が多い場合は解析条件を変更することを検討します。
・解析が完了したらFinish。
・次にT2で観測したデータをドロップします。
・Aセッションに追加しますか?と聞かれるので「はい」を選択します。
・データ取得間隔、点番号、点名を確認して問題なければNext。

・受信機とアンテナの種類とアンテナ座面高の確認をして問題無ければNext。
・新点なので何も入力せずNext。
・T1と同様「続けて解析処理を行う」のチェックを入れてFinish。
・T2での測位ウィザードです。T1と同様の設定にします。
・基準局はT1を選択します。
※基準局を選択した点が始点、解析している点が終点となり、ベクトル方向がT1→T2となります。
・解析が始まり終了したらFinish。
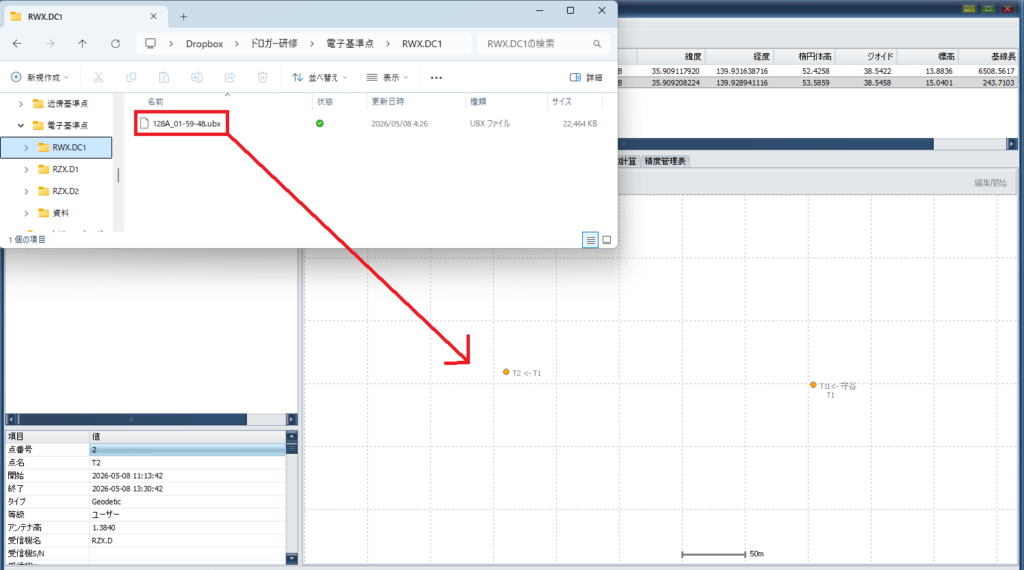
・最後の3点目のT3で観測したデータをドロップします。
・Aセッションに追加しますか?と聞かれるので「はい」を選択します。
・データ取得間隔、点番号、点名を確認して問題なければNext。

・受信機とアンテナの種類とアンテナ座面高の確認をして問題無ければNext。
・新点なので何も入力せずNext。
・T1,T2と同様「続けて解析処理を行う」のチェックを入れてFinish。
・T3の測位ウィザードでは、「基準局」をT2にしてNext。
(※T3ではRWX.DCで観測したので2周波を選択しています。)
・解析が完了したらFinish。
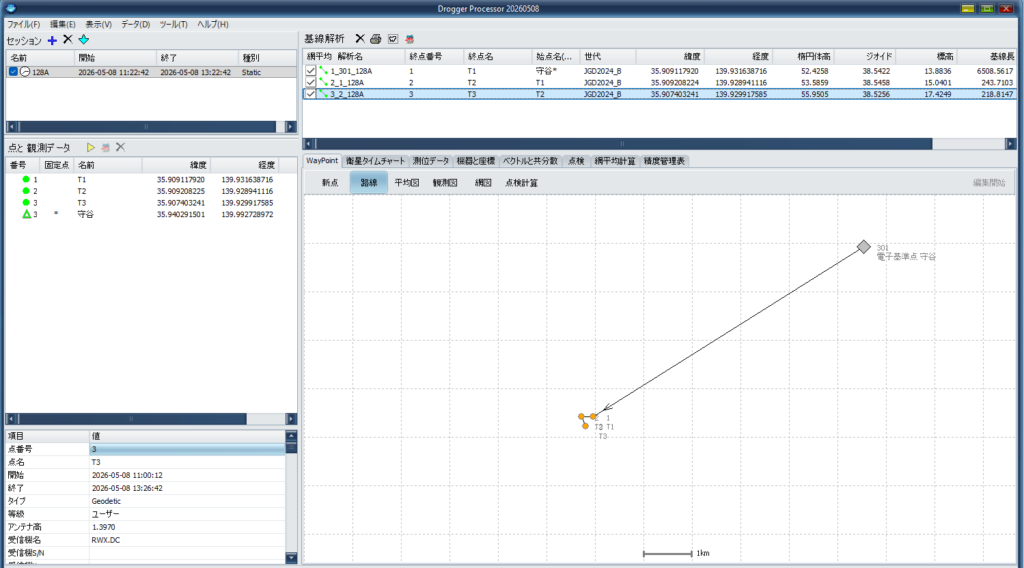
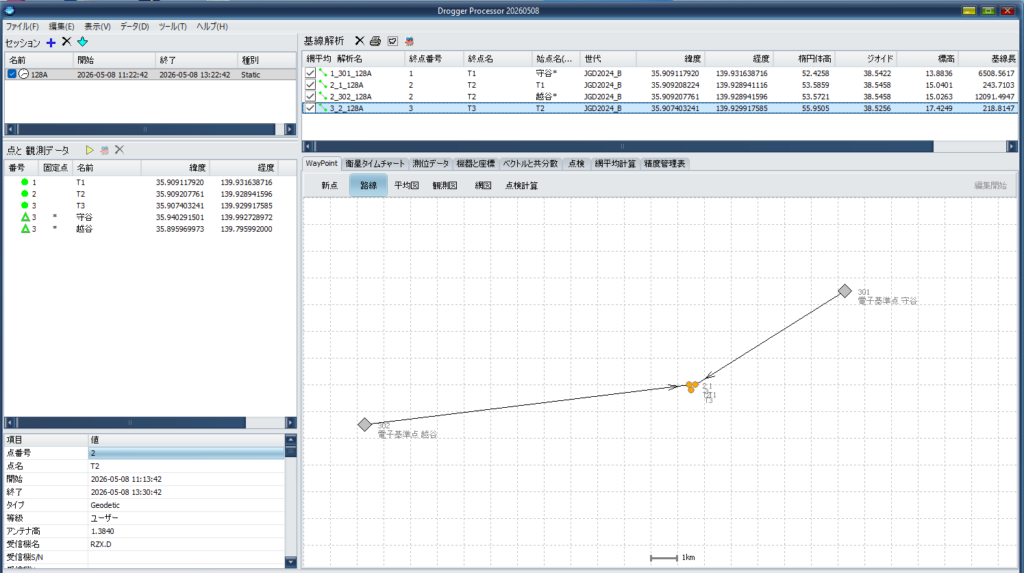
・3つ解析が出来ました。Waypointの路線タブを見ます。
守谷→T1→T2→T3と基線ベクトルが出来ています。矢印の向きも確認します。
※矢印の向きがセッション計画と同じかどうか確認します。
・次に越谷→T2の基線解析をします。
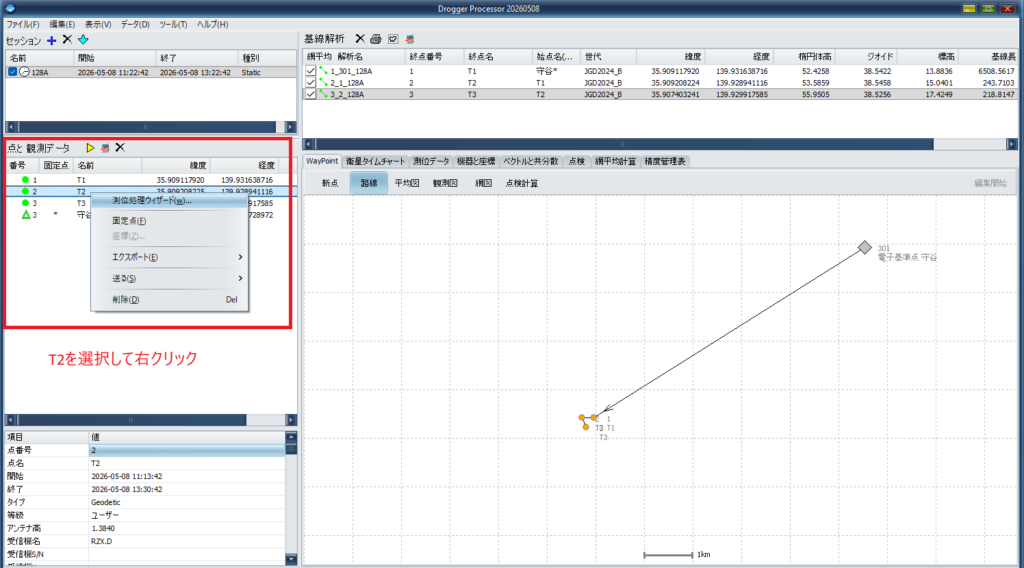
・点と観測データの箇所のT2を選択して右クリックメニューを開きます。
・測位処理ウィザードをクリック。
・基準局で電子基準点を選択してNext。
・越谷→T2の基線ベクトルを作りたいので、越谷にチェックを入れてNext。
・解析が完了したらFinish。
・路線を確認します。越谷→T2が繋がりました。
・残りのT3→白井の基線ベクトルを作ります。
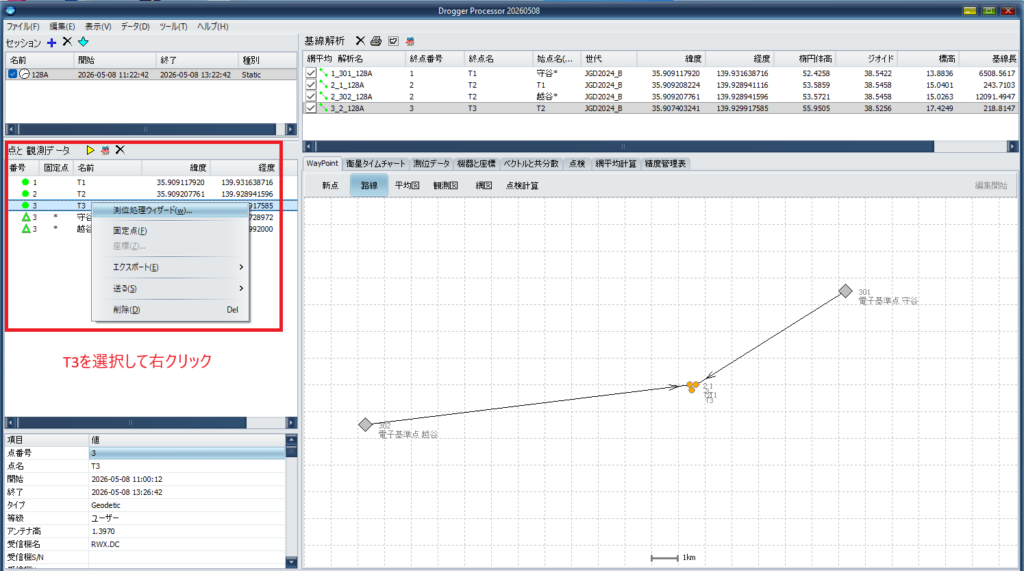
・点と観測データの箇所のT3を選択して右クリックメニューを開きます。
・測位処理ウィザードをクリック。
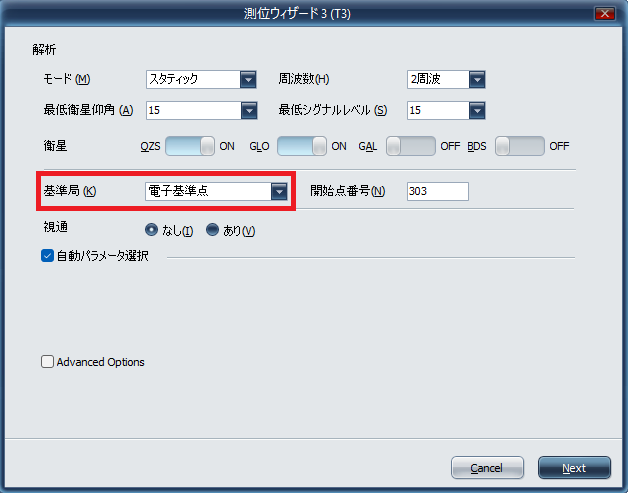
・基準局で電子基準点を選択してNext。
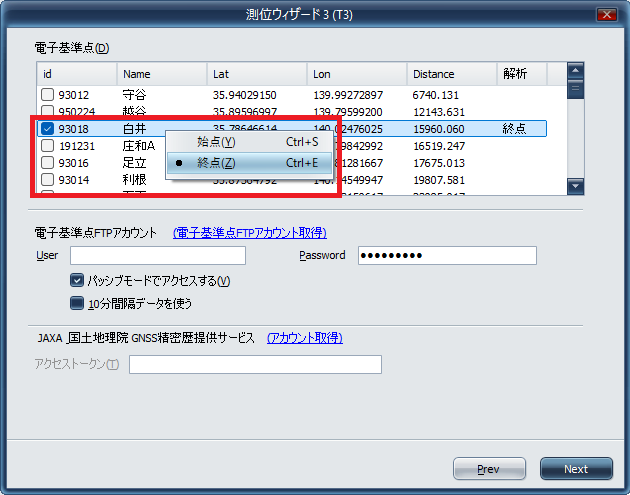
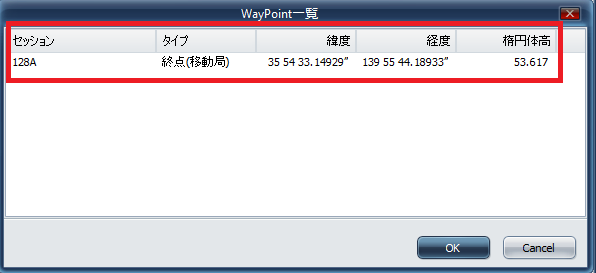
・T3→白井の基線ベクトルを作るので、白井にチェックを入れて右クリックメニューから終点を選びます。
・そしてNext。
・解析が完了したらFinish。
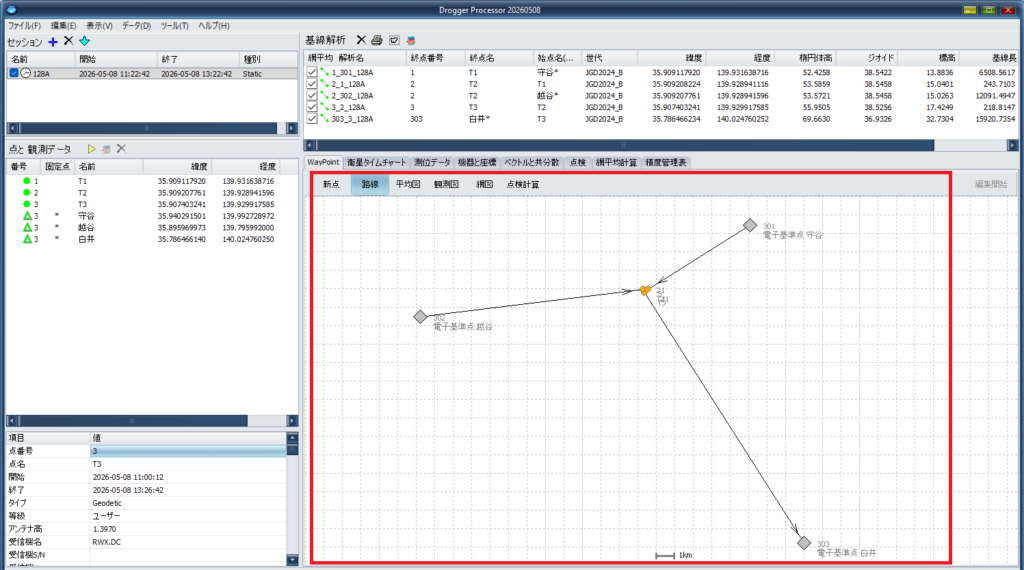
・全ての基線ベクトルができました。路線を確認してベクトル方向に間違いないか確認します。
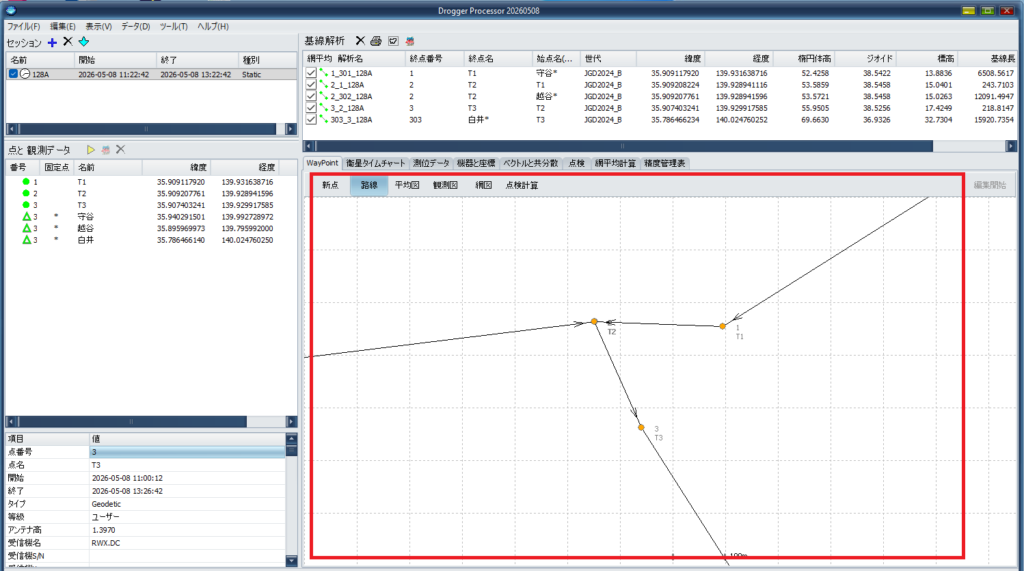
・路線の箇所は、マウスホイールで拡大できます。T1→T2→T3となっているか確認します。

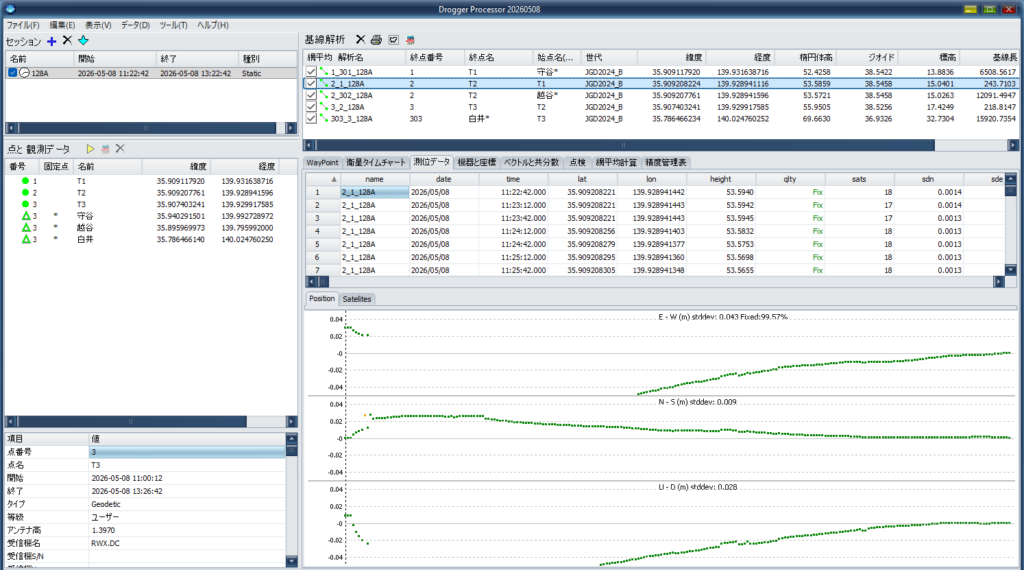
・各基線解析の測位データを確認しましょう。基礎解析欄の解析名をクリックすると該当の測位データが赤く囲んだ箇所に出ます。
これは守谷→T1の測位データになります。
・黄色の点はFloat解、緑の点がFix解です。FixedはFix率で、この解析ではFix率が100%です。
三つグラフがあり、上から緯度・経度・楕円体高のグラフです。
・グラフ中央の-0付近(平均値の基準)にFix解があるのが望ましいです。
※測位データを見てFix率が悪い、グラフの形状が良くない場合は、解析の時の条件を色々変えて良い結果になるようにします。
・T1→T2の測位データです。
・前半の緯度・楕円体高のグラフがよろしくなさそうです。
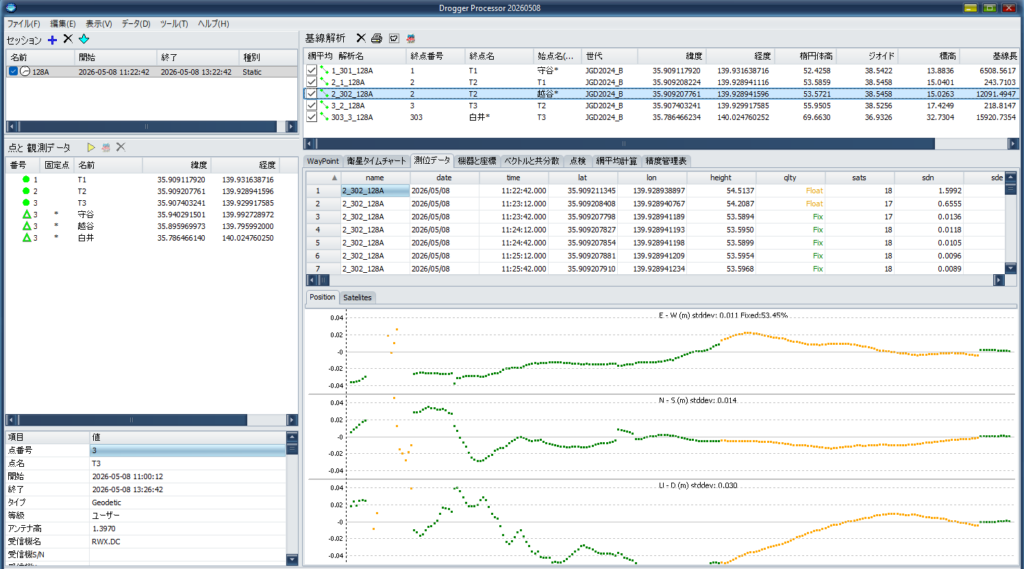
・越谷→T2の測位データです。
・Fix率も悪く、後半はFloatしています。条件を変えて再解析するのを検討します。
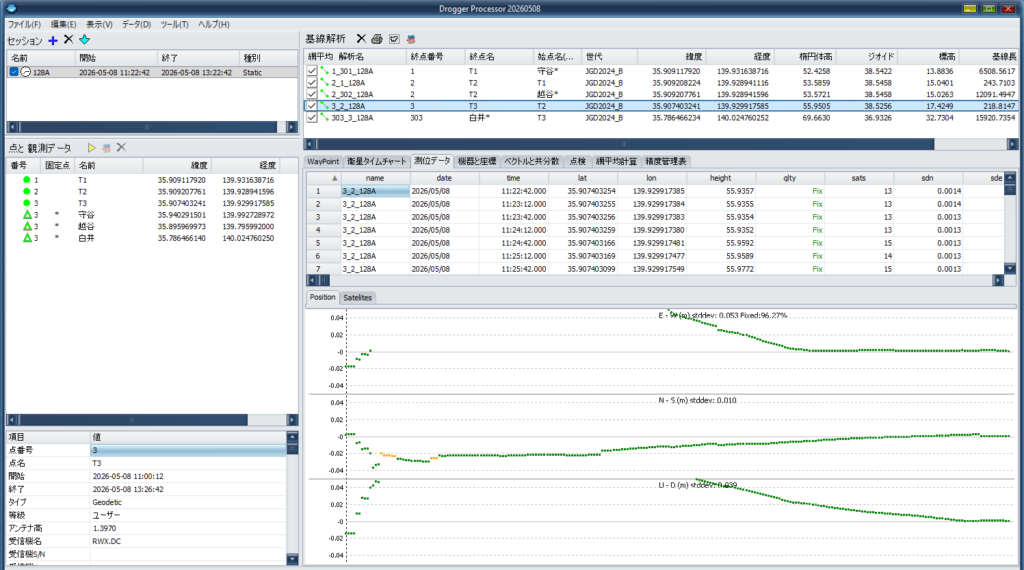
・T2→T3の測位データです。
・T1→T2の測位データ同様、前半の緯度・楕円体高のグラフがよろしくなさそうです。
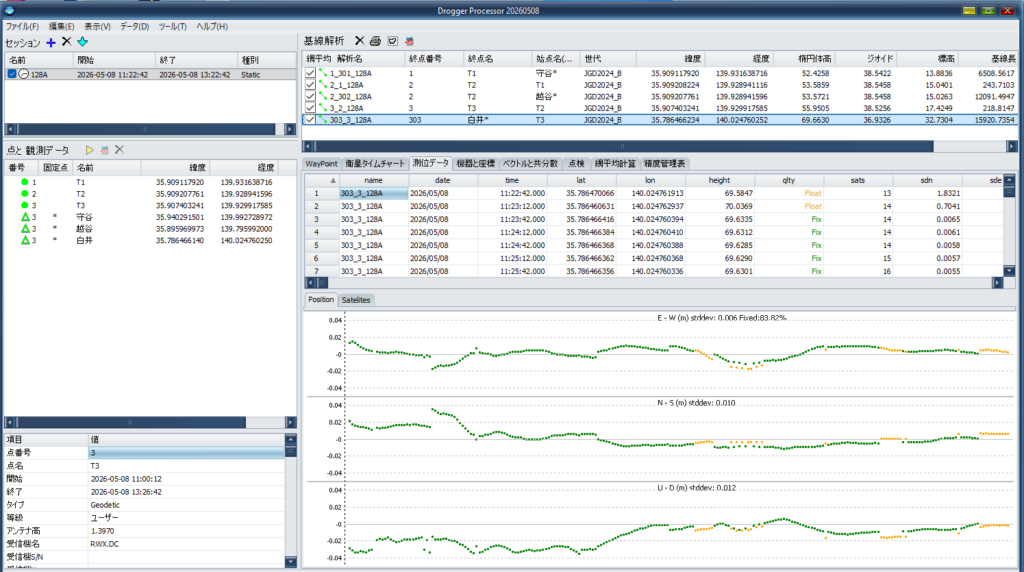
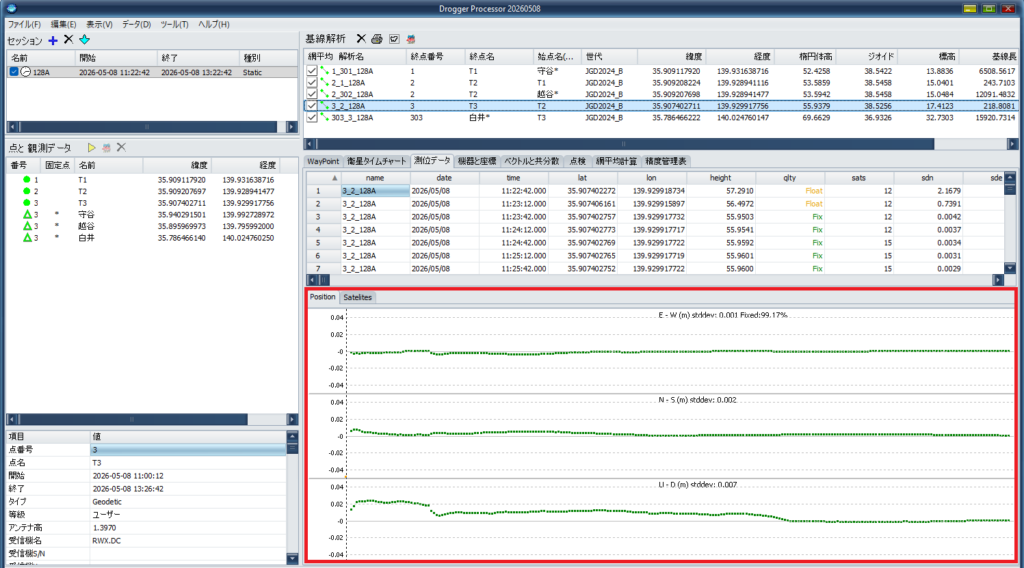
・T3→白井の測位データです。
・これも再解析を検討します。
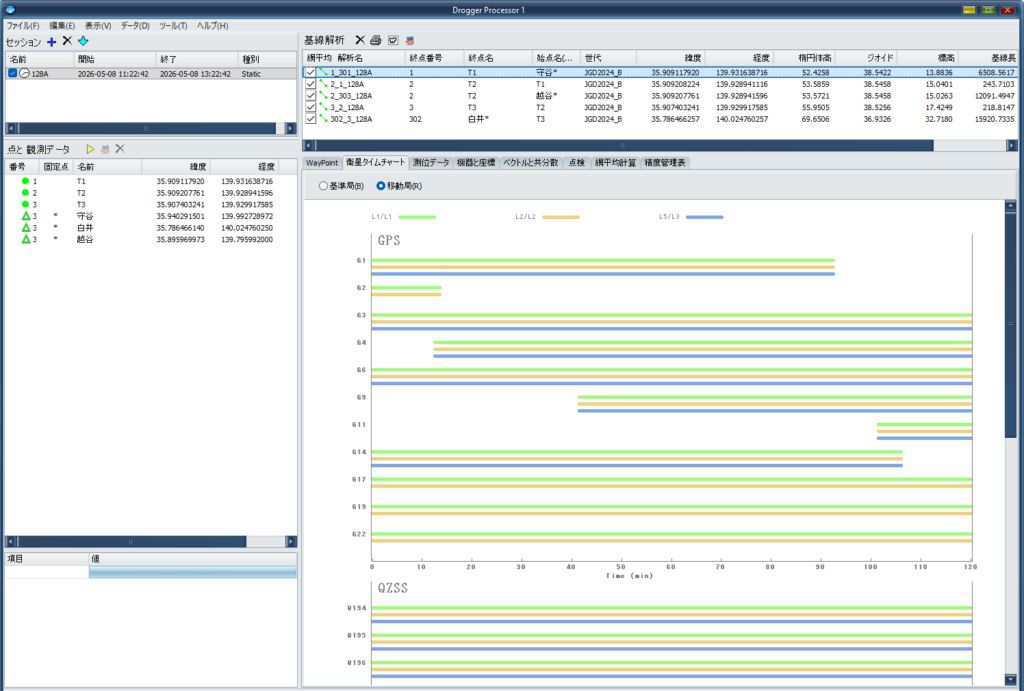
・衛星タイムチャートタブで衛星毎にセッション内で観測された時間を確認できます。
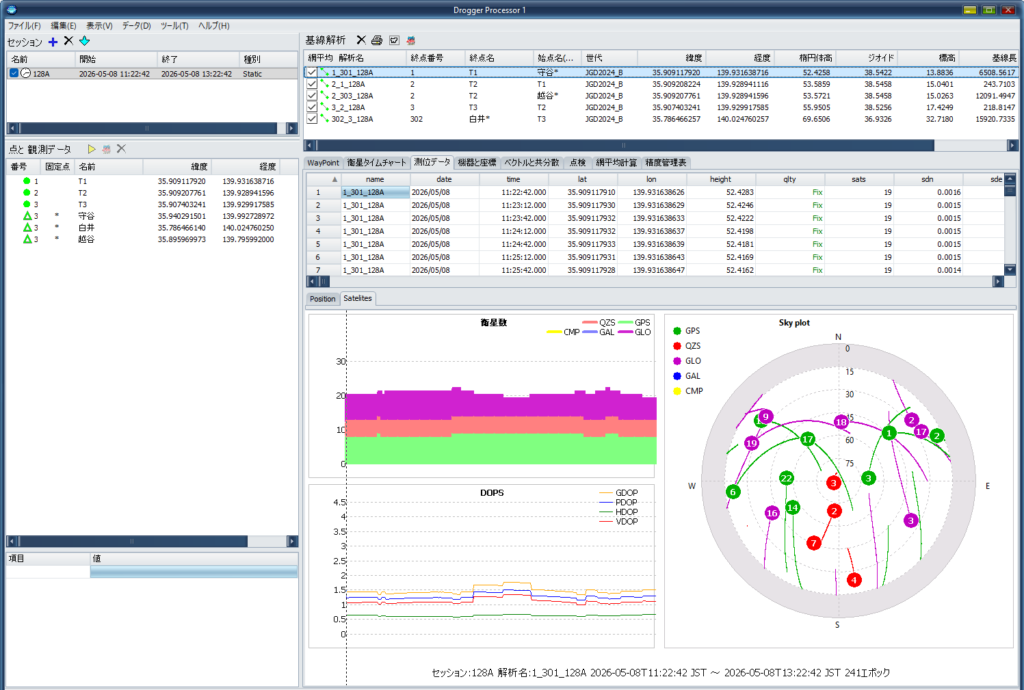
・測位データタブのSatellitesタブで、時間ごとの衛星数、DOP、天空図が確認できます。
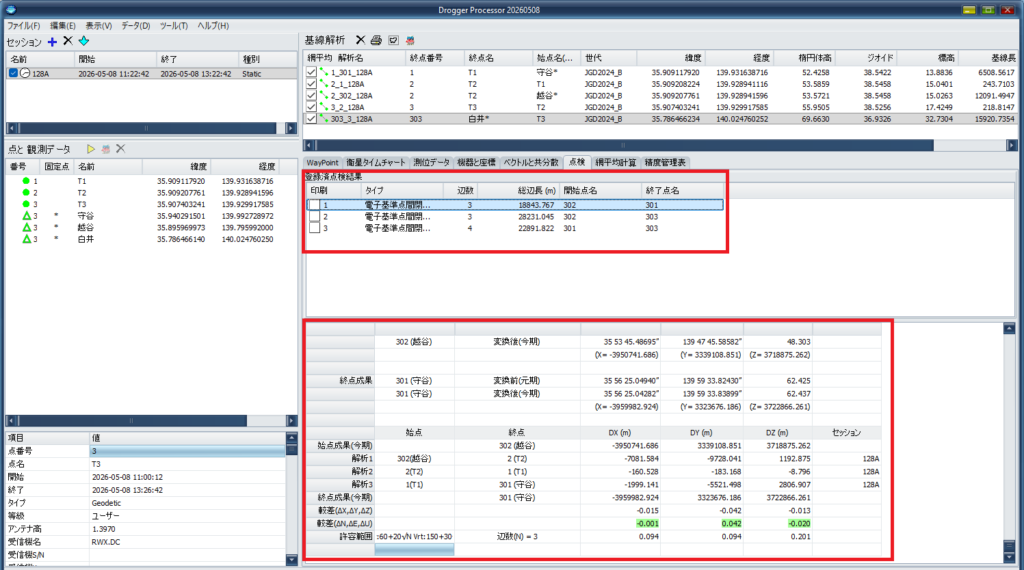
・登録済点検結果欄の3つ全ての閉合差を確認します。
電子基準点間の閉合差が表示されます。
・ΔNは水平面の南北成分の閉合差、ΔEは水平面の東西成分の閉合差、ΔUは高さ成分の閉合差を表しています。
閉合差が許容範囲内であると緑色のハイライトがつきます。許容範囲外になると赤くハイライトされます。
・許容範囲外の場合は、解析時の条件を色々変えて許容範囲内になるようにする。若しくは再測や測点を変えるなど検討します。
・登録済点検結果欄の印刷のところのチェックボックスにチェックを入れると精度管理表に出力されます。
作業規程では、点検路線は最小辺数で点検、全ての電子基準点は1つ以上の点検路線で結合するとあります。
上の2つの点検結果で越谷→守谷、越谷→白井と最少辺数で全ての電子基準点の点検ができますのでチェックを入れます。
・越谷→白井の閉合差です。ΔN、ΔE、ΔUの閉合差は許容範囲内です。
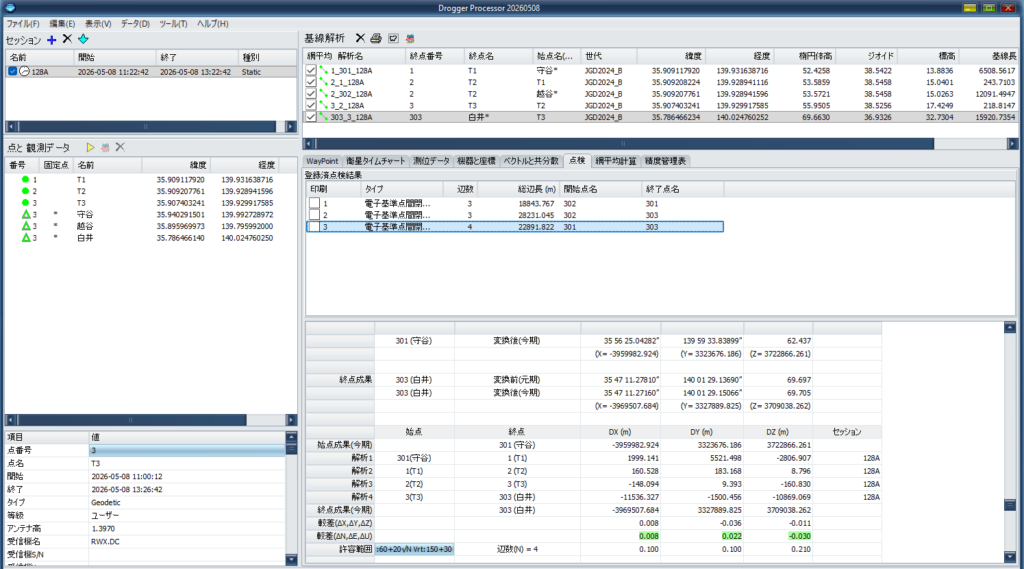
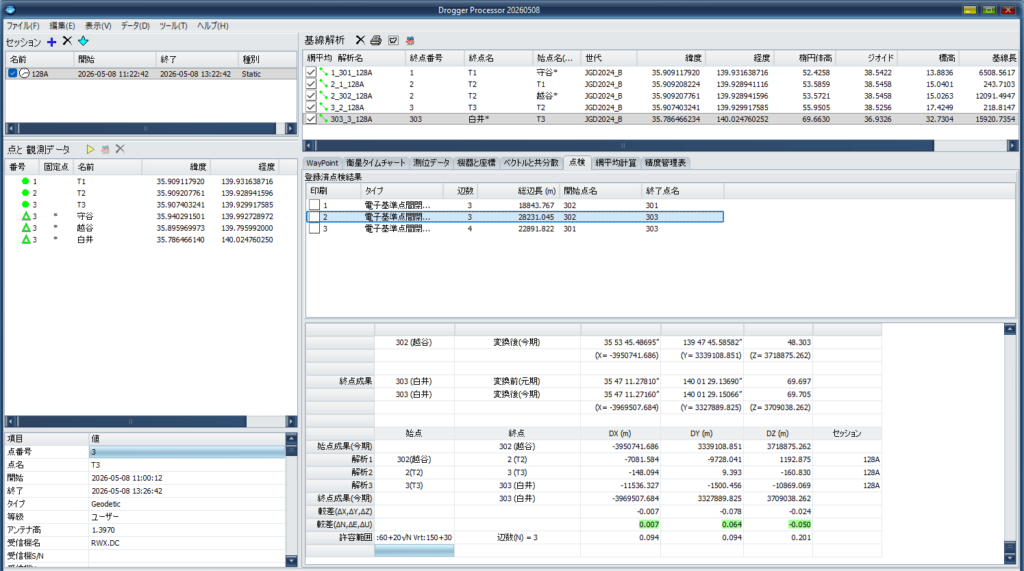
・守谷→白井の閉合差です。こちらもΔN、ΔE、ΔUの閉合差は許容範囲内です。
・点検結果が全て許容範囲内でしたので、実用網計算をします。
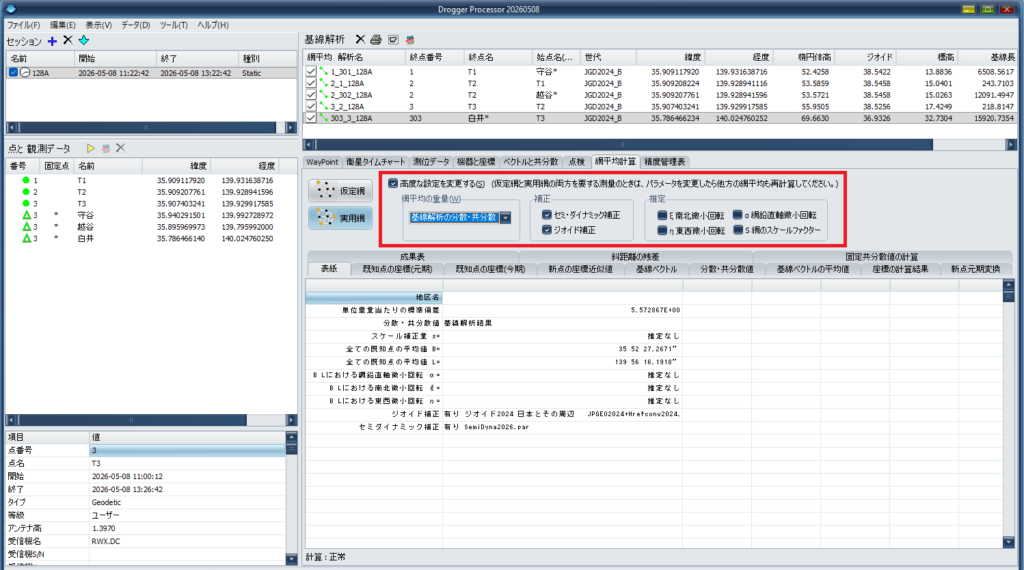
・網平均計算のタブを選ぶと自動的に実用網平均計算がされますが、以下の項目を確認して違っていれば、
「高度な設定を変更する」にチェックを入れて変更します。
・「網平均の重量」は1セッションの観測なので、基礎解析の分散・共分散を選びます。
※2セッション以上の観測の場合は、固定値を選びます。
・「補正」はセミダイナミック補正、ジオイド補正両方にチェックを入れます。
・「推定」は全てのチェックを外します。
・以上で計算は終了です。
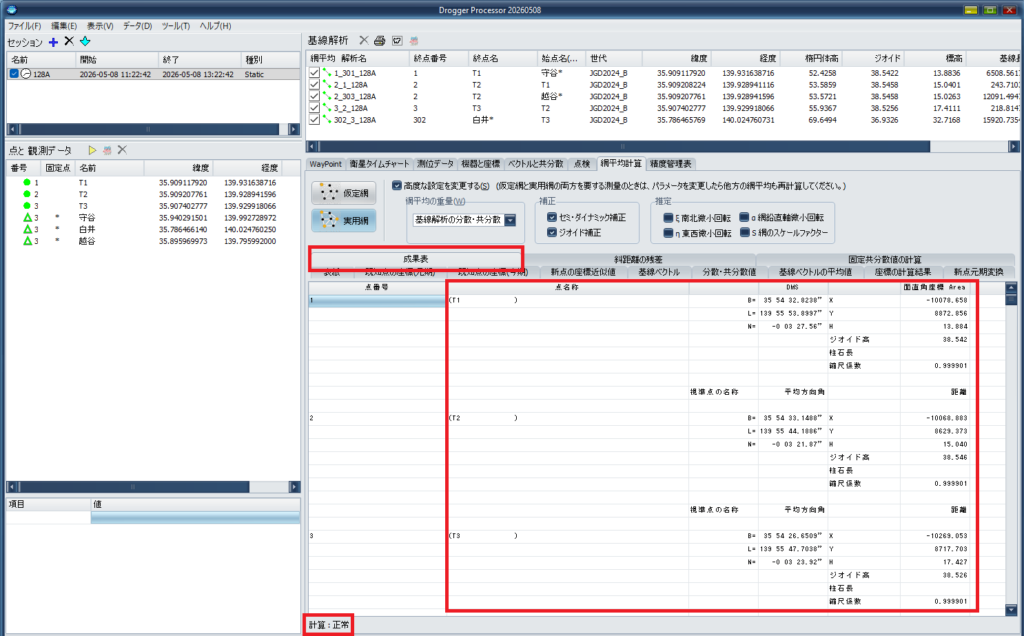
・成果表タブを確認します。新点の座標が計算されています。
・下の欄に「計算:正常」となっていればOKです。

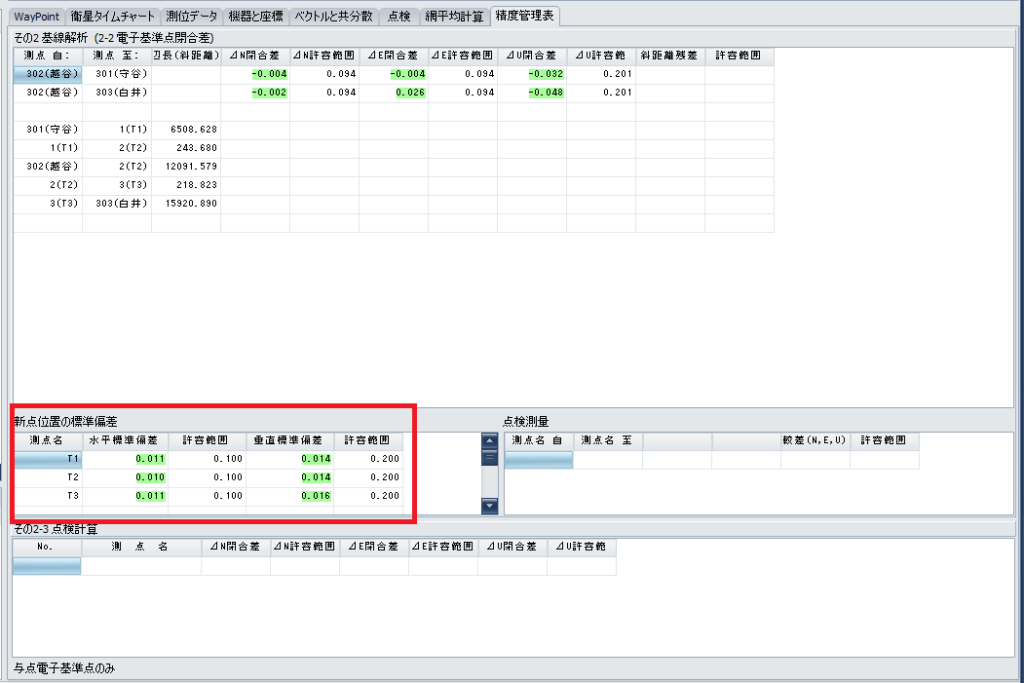
・精度管理表を確認します。点検タブでチェックした閉合差が転写されています。
・新点位置の標準偏差の水平標準偏差と垂直標準偏差を確認します。
この数値が小さいほどデータのばらつきが無く精度が良かったと判断できます。
又、この数値を調査報告書に記載しています。
・Commercial ライセンスがなければ三次元網平均計算を行って標準偏差を出して確認する必要があります。
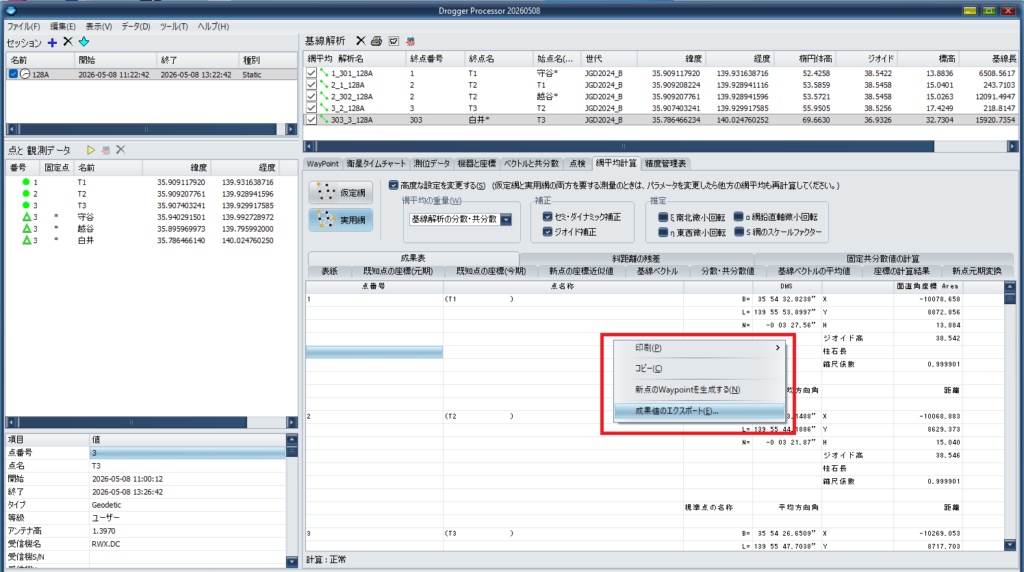
・「成果表」のところで右クリック→成果値のエクスポートでSIMAファイルを出力できます。
ポイント
・ここでT1,T2,T3のSIMAファイルを測量計算ソフトに入れて、T1~T3を与点としてTSで観測した新点T5~T8の基準点測量の計算を行います。
・計算結果が問題なければDrogger Processorでの解析は終わりとなります。
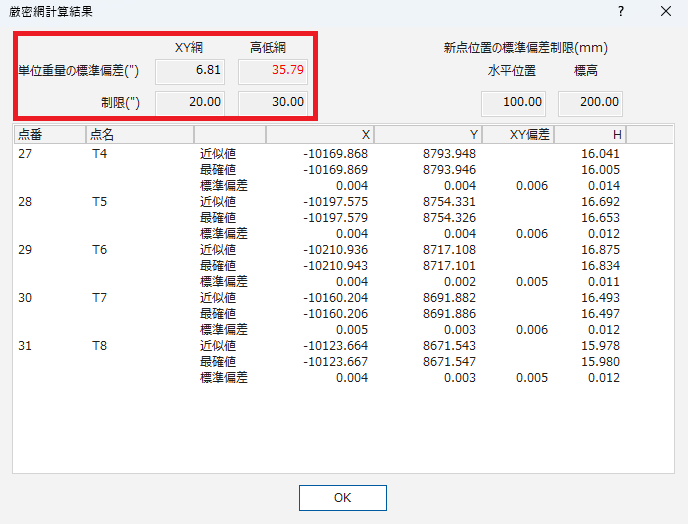
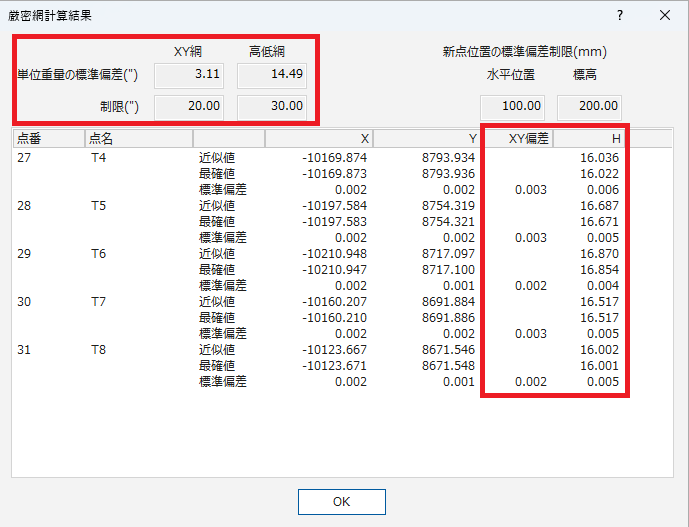
・トレンドワンの厳密網計算結果です。
高低網の標準偏差が制限をオーバーしたので再度解析をします。
条件を変更して解析
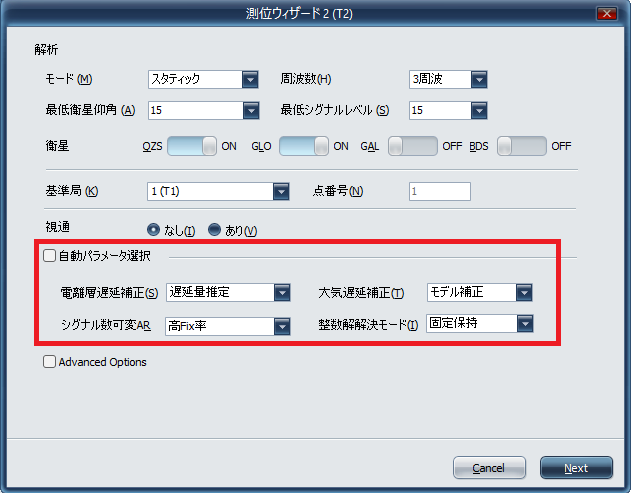
・測位データのFix率が悪かった、越谷→T2の基線解析を条件を変更して解析してみます。
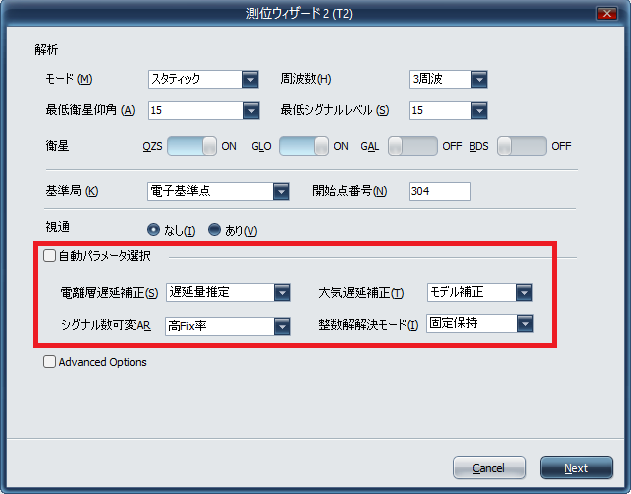
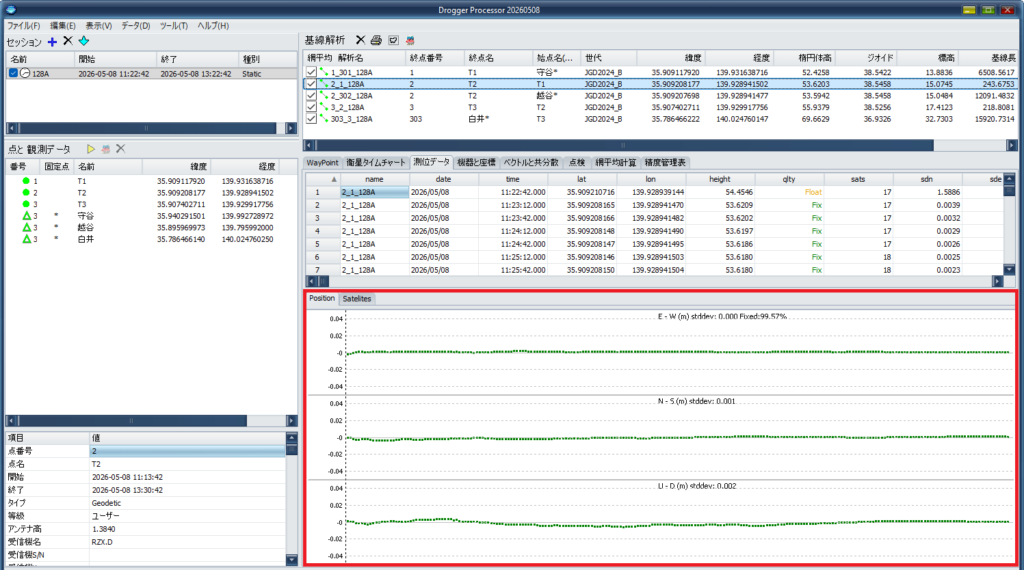
・「自動パラメータ選択」をOFFにして個別に条件を指定します。
・「電離層遅延補正」は「遅延量推定」-> 「遅延量推定Ex」--> 「モデル補正」の順に解析することを推奨されていますので
今回は「遅延量推定」を指定し、他の条件は↑の通りで解析してみます。Nextです。
・上書き確認のダイアログが出ますが「OK」を押して再解析です。
ちなみに各条件の説明は、こちらで確認してください。
※条件の変更は他にも「最低衛星仰角」の変更、「最低シグナルレベル」の変更、「衛星」の選択などあります。
Fix解が得られない場合は色々変えて解析してみてください。
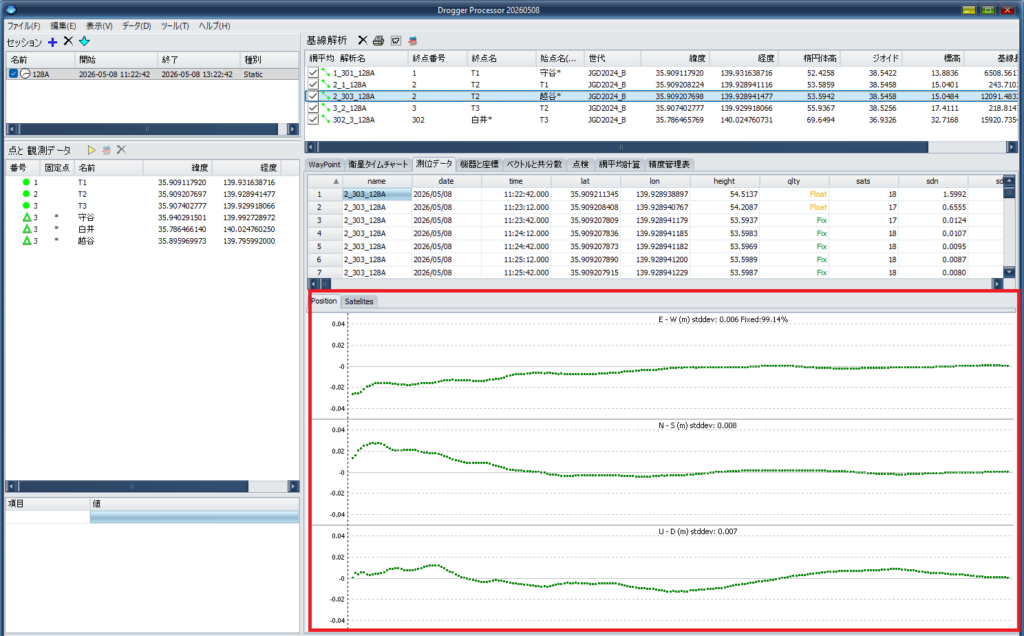
・再解析の結果です。Fix率が53.45%から99.14%に跳ね上がり、グラフもきれいに収束しています。
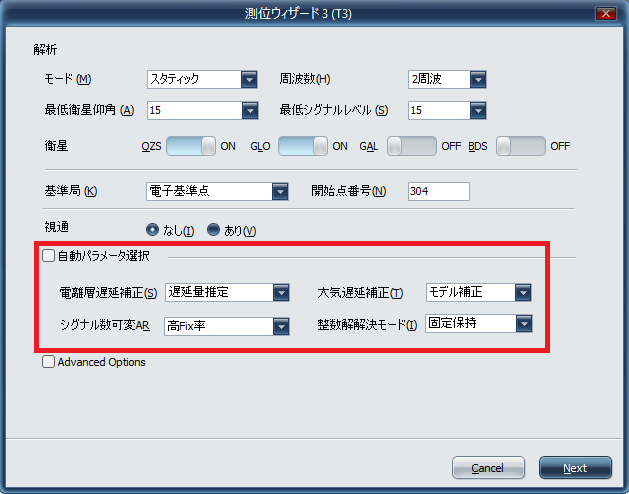
・次にT3→白井の基線解析も同じように条件を変更して解析します。白井を終点にするのを忘れないように。
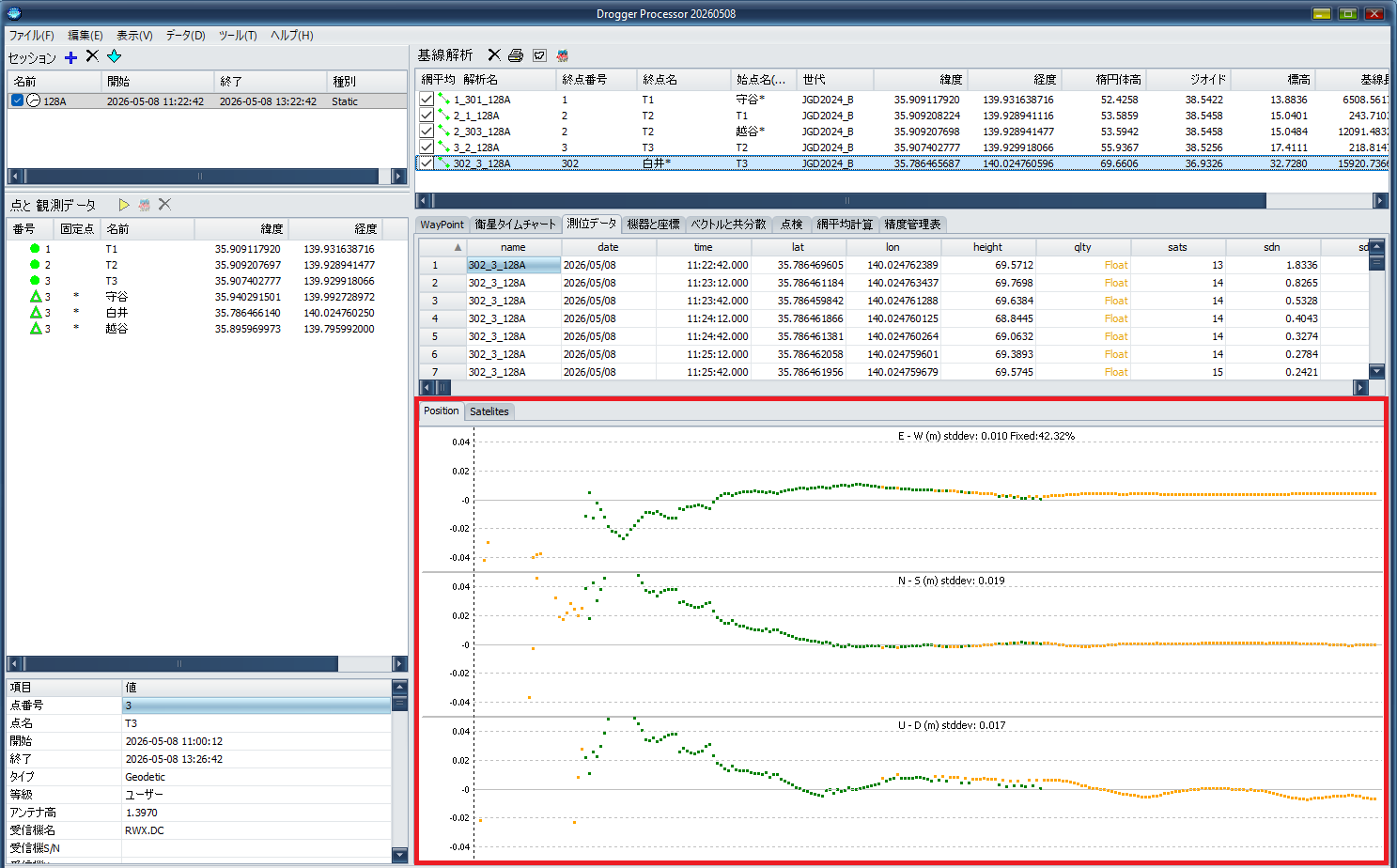
・Fix率が83.82%から42.32%に劇的に下がり、Float解が増えてしまいました。再度条件を変更して解析します。
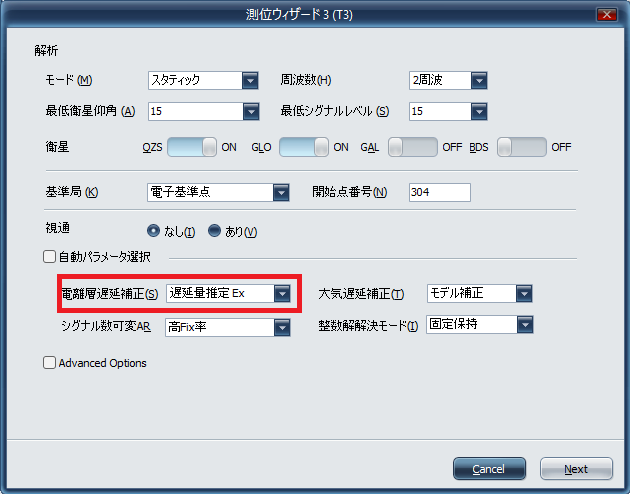
・「電離層遅延補正」で遅延量推定から遅延量推定Exに変更して解析します。
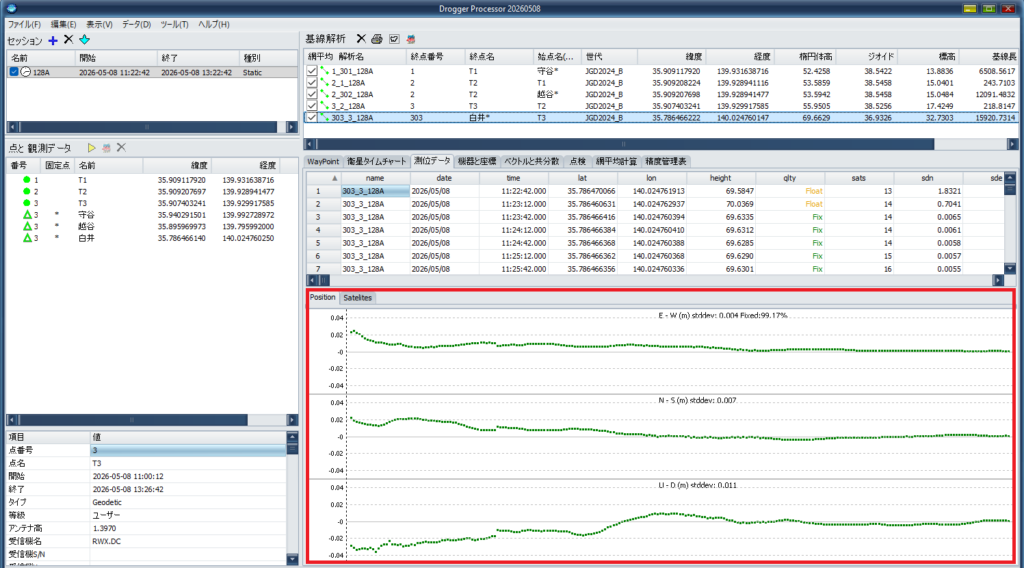
・Fix率が42.32%から99.17%になり、グラフの形状も劇的に良くなりました。
・次にFix率は問題ありませんでしたが、グラフ形状が良くなかったT2→T3とT1→T2の基線解析も条件を変えて解析します。
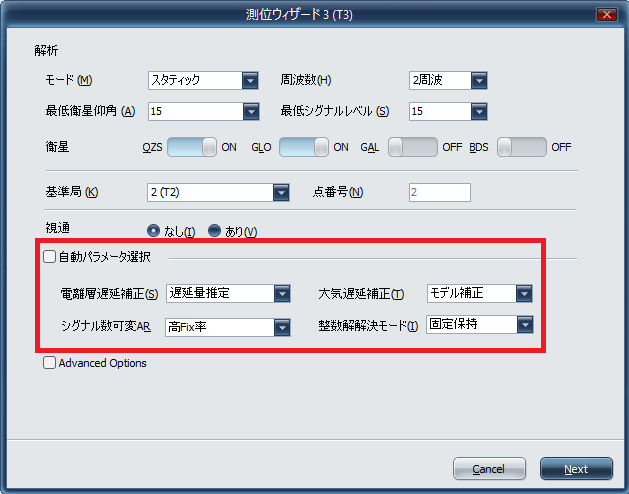
・今までと同じように「電離層遅延補正」を遅延量推定にして解析します。
・Fix率が96.27%から99.17%に上がり、グラフの形状がぐっと良くなりました。
・最後にT1→T2の基線解析もやってみます。
・これも今までと同じように「電離層遅延補正」を遅延量推定にして解析します。
・こちらもグラフがきれいに収束しました。
再解析したので、点検タブの電子基準点間閉合差を再度確認してください。
・問題なければ、再度SIMAファイルを出力→測量計算ソフトで基準点計算をします。
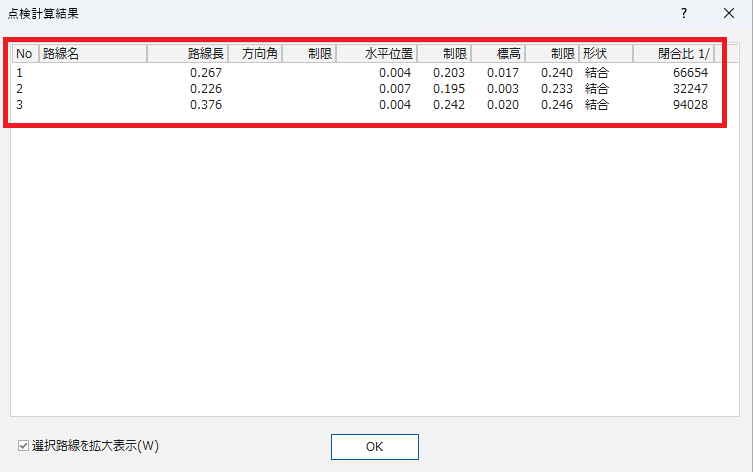
・トレンドワンでの路線の点検計算結果です。閉合比を確認してください。とても良いです。
・厳密網計算結果です。新点位置の水平位置、標高の標準偏差を確認します。とても良いです。
・TSでの基準点測量の結果が問題無いことを確認しました。Drogger Processorに戻ります。
・精度管理表で新点位置の標準偏差水平標準偏差、垂直標準偏差の数値を確認します。
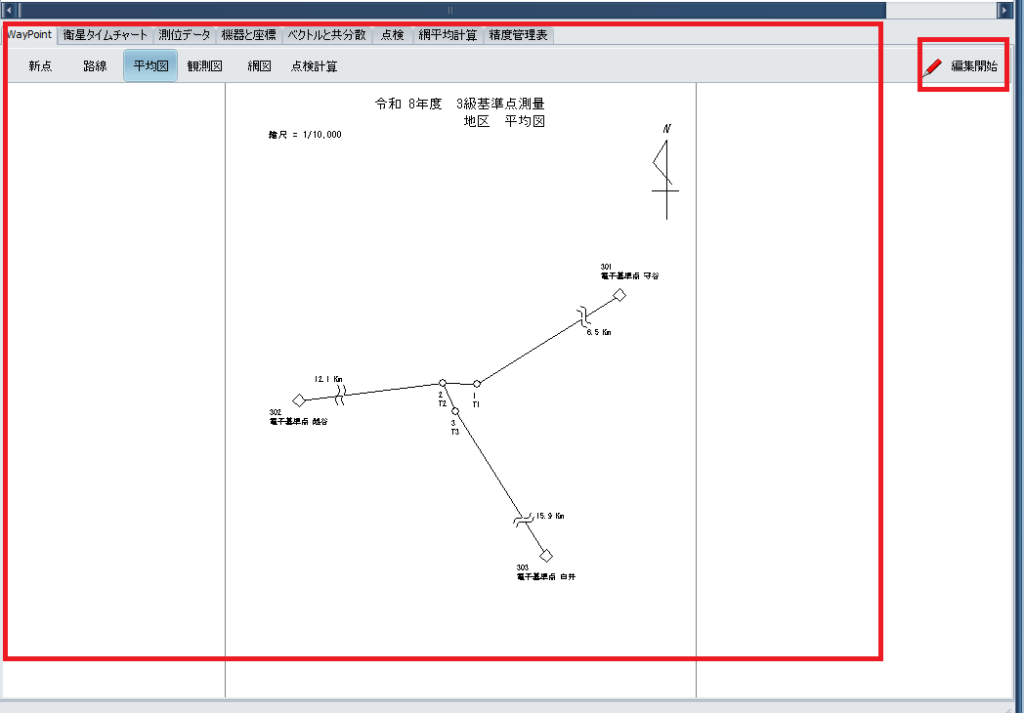
・WayPointで平均図、観測図、網図、点検計算を確認できます。
文字が重なっていた時、右上の編集開始で文字を移動できます。他の図面にも編集は反映されます。
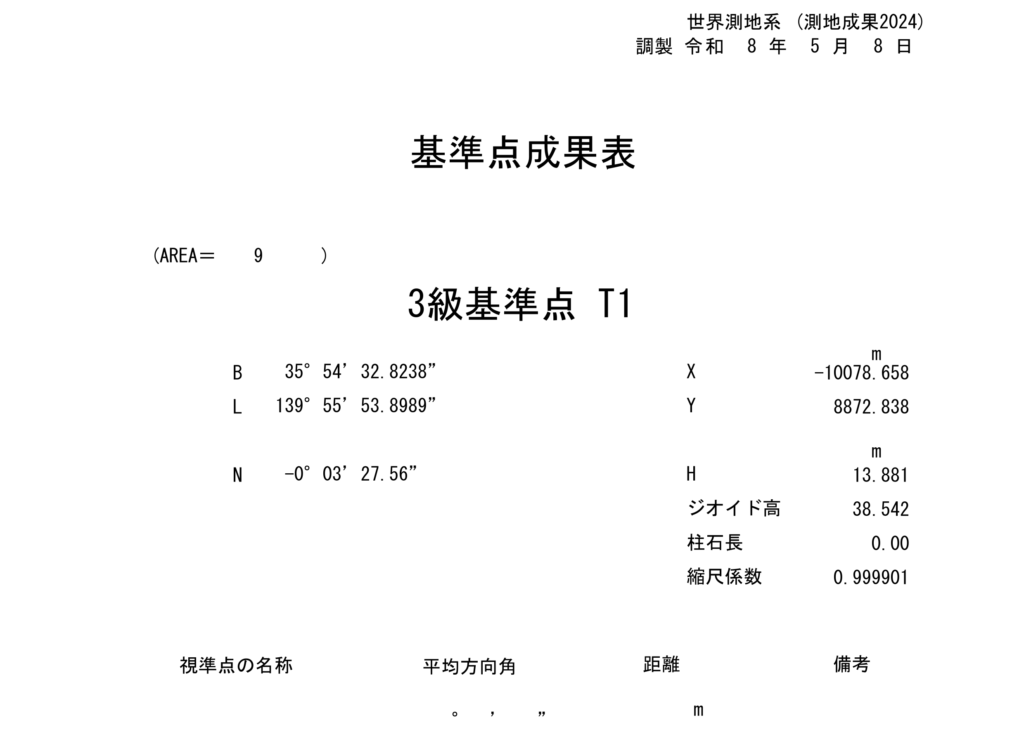
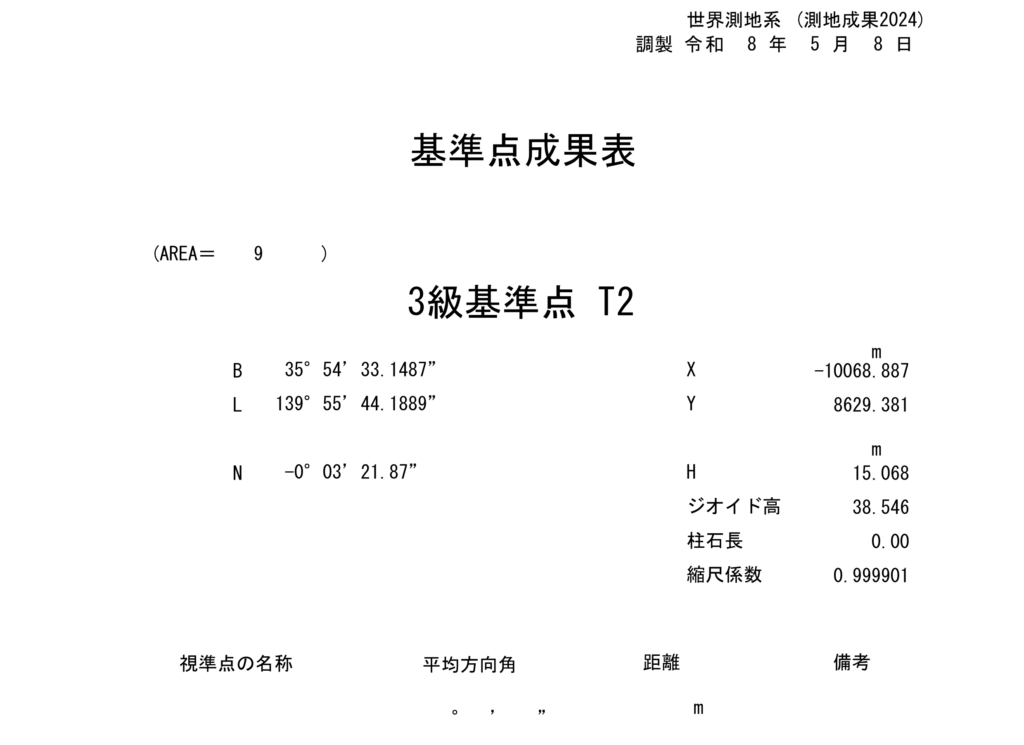
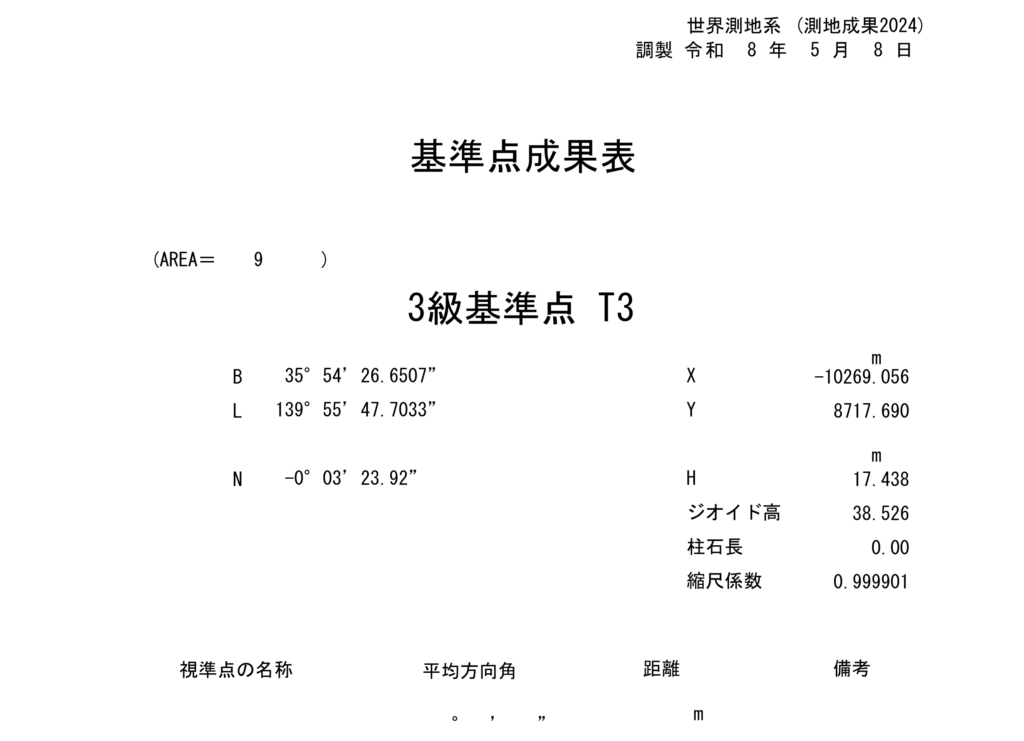
・新点の成果表です。成果表タブで印刷できます。
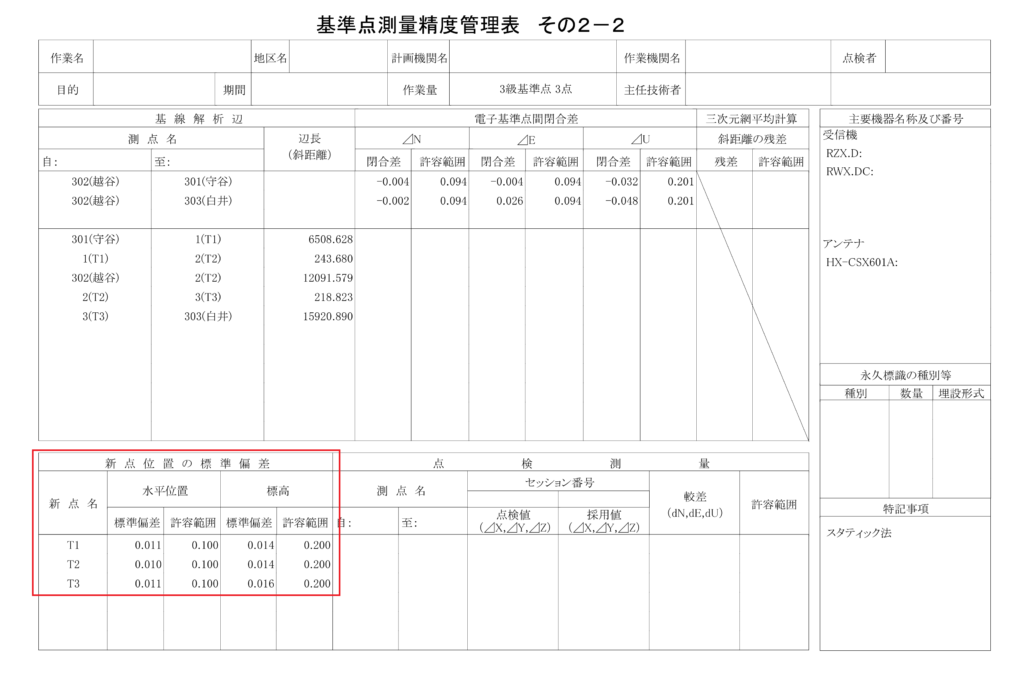
・精度管理表です。精度管理表タブで印刷できます。
・赤枠で囲った新点位置の標準偏差を調査報告書に記載します。
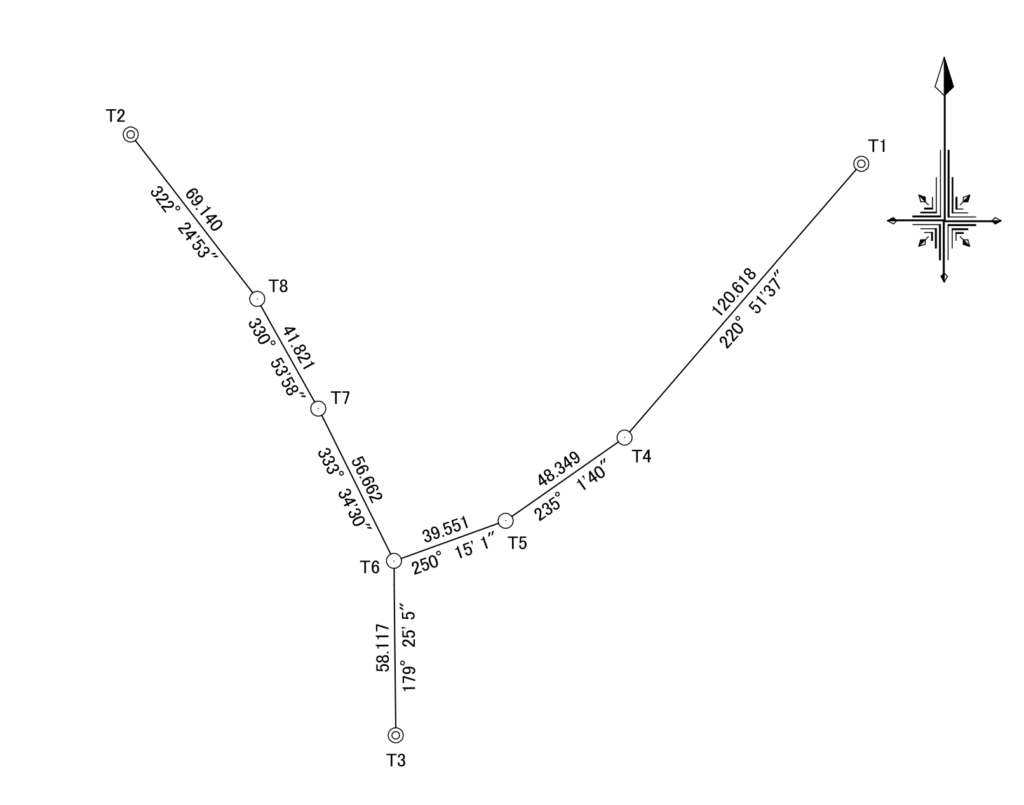
・TSで結合多角方式の4級基準点測量の基準点網図です。
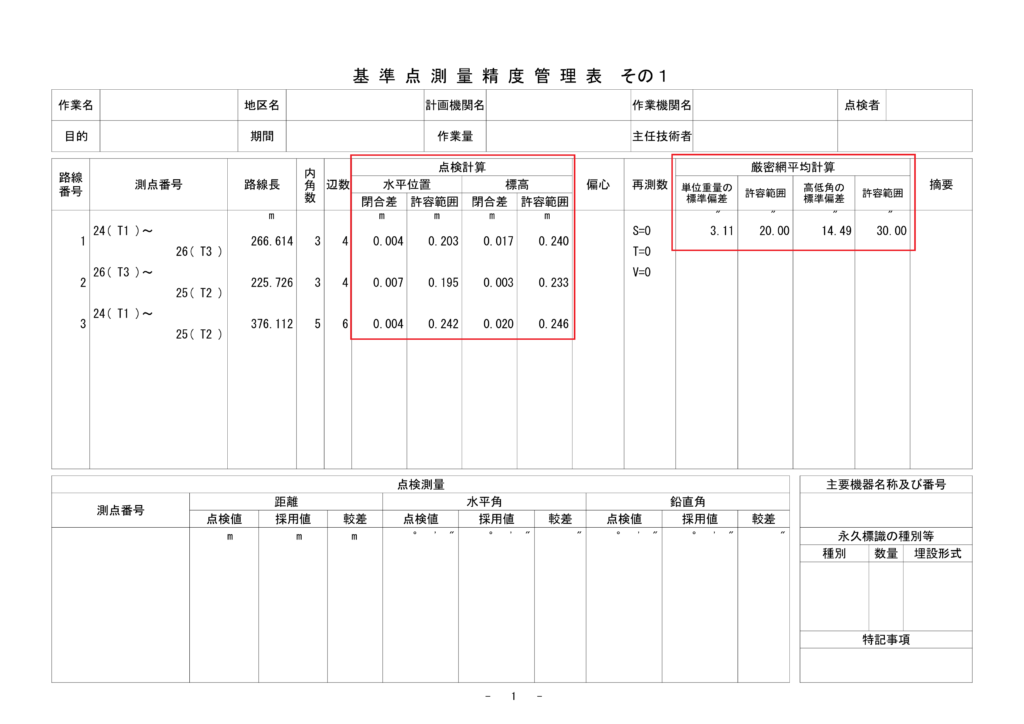
・同様に4級基準点測量の精度管理表です。赤枠の点検計算の水平位置、標高の閉合差と
厳密網平均計算の単位重量の標準偏差と高低角の標準偏差を調査報告書に記載します。
超重要!!
・GNSS観測では、条件を変えて解析することができます。 色々試して、選り良い計算結果を求めてください。
※それでも上手くいかない場合は、再測や位置の変更を検討します。
受信機(Drogger)2台の場合
・受信機(Drogger)2台の場合、AセッションBセッションと2セッションの観測を行います。
・セッション計画を再度確認します。
AセッションでT1,T2で観測、BセッションでT2,T3で観測です。
・解析は途中まで一緒です。Aセッションで守谷→T1、T1→T2
BセッションのT2の観測データを取り込んだ時の解析はこちらです。

・T2のRINEX変換処理時に基準局としての利用のところで、「このデータの座標を指定する」にチェックと「種別」をユーザに変更して
解析結果から転記のボタンを押します。
・Aセッションの解析結果を選んでOK。

・解析結果が転写されたのでNext。
・次にBセッションのT3の観測データを入れて、T2→T3の解析とT3→白井の解析
Aセッションの越谷→T2の解析をしてください。
・網平均計算の「網平均の重量」は2セッションなので固定値を選択です。
・後は3台での解析と同様です。
地積測量図、調査報告書の作製例
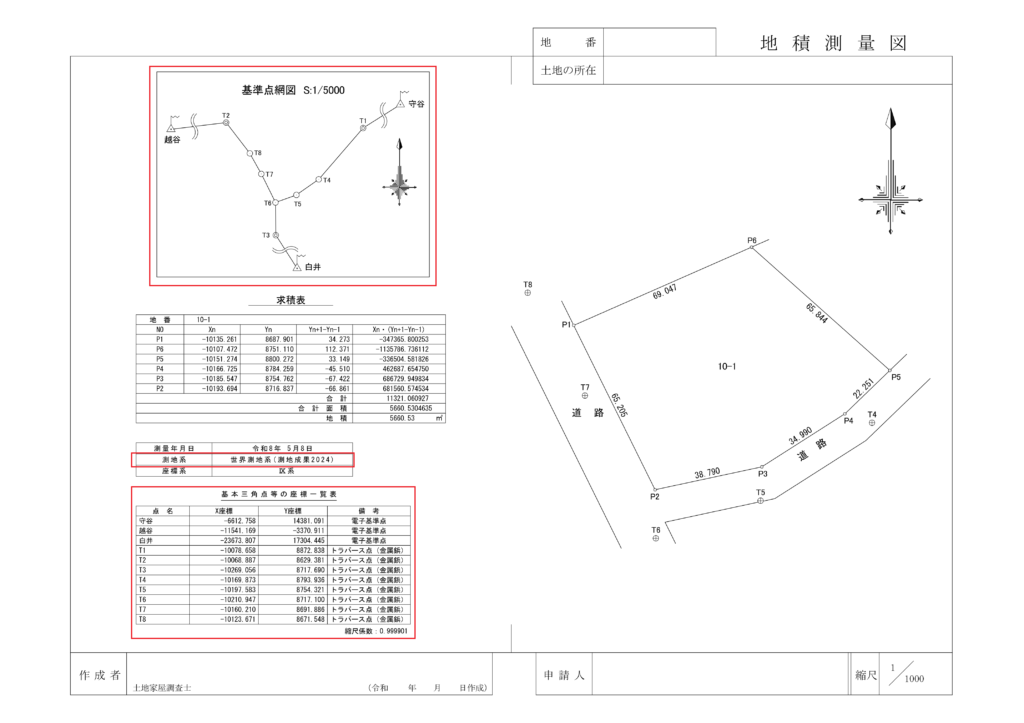
・地積測量図の作製例です。
・GNSS観測のスタティック法によって新点を作った場合の作製例は連合会等から出ていません。
色々な先生に確認したところ、皆さん好きなように記載しているとの事ですので、↑のも参考としてください。
基準点網図を載せていないという先生もいらっしゃいました。
・自分は基準点網図を載せて、測地系は電子基準点を使ってるので世界測地系(測地成果2024)と記載、図面に新点は載せてます。
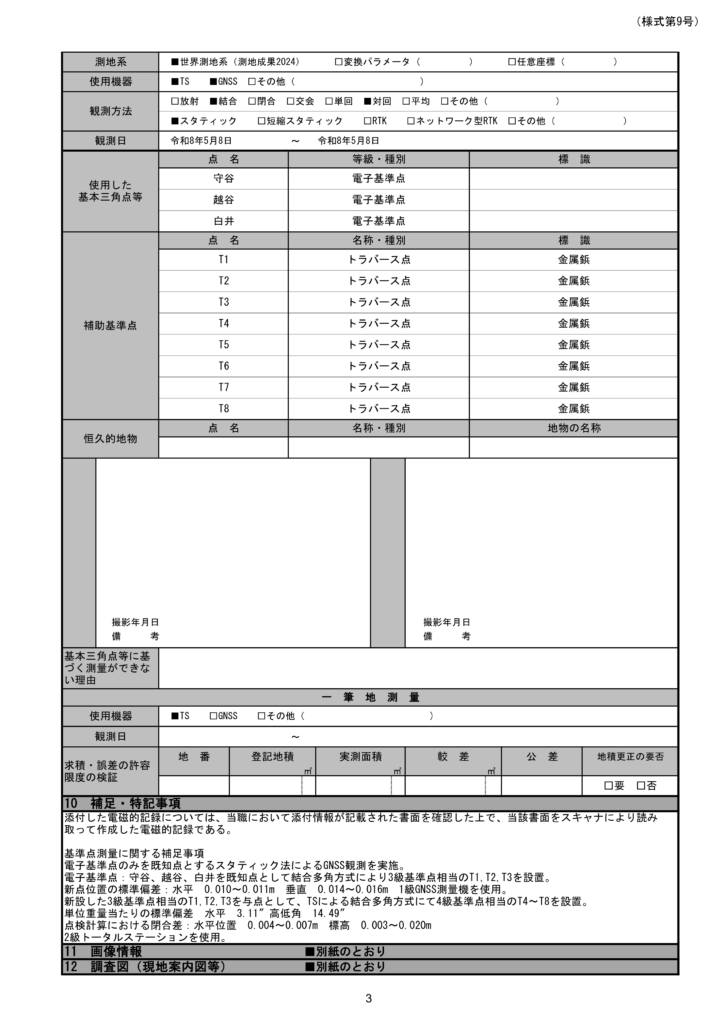
・調査報告書の記載例です。書籍「表示登記添付情報作成の実務」を参考にしています。
・新点位置の標準偏差は、精度管理表から転写しています。
・↑では省略していますが、新点の写真は載せてください。
以上が今回の研修での内容となります。